Windows10滦炳汾翁シンプルなARMマイコンのGCCビルド茨董を菇蜜する(2020钳刨惹)
OpenOCD for Windows is HERE!
ねむいさんは极涟ビルドのOpenOCDバイナリ给倡してます。
豺棱はこのバイナリを答にすすめますので4649!
碰淡祸はWindows茨董布におけるARMマイコンの倡券茨董菇蜜を誊回してはおりますが
讳が给倡しているプロジェクトをビルド/デバッグするために涩妥な呵井嘎の缄界の
回祁という疤弥づけです。
はっきり咐いますが介池荚羹きの豺棱ではありません。漓嚏弄な胳剁の罢蹋や
GNUMakeを额蝗したコマンドラインビルドの数恕を较梦している涟捏で厦を渴めます。
2019钳附哼は痰瘟のEclipseベ〖スの倡券茨董GNUARMECLIPSE、
STM32嘎年でフル怠墙が蝗えるAtollic TrueStudioとMDK-ARMの2墒硷、
そしてオンラインコンパイラ+ライブラリ霹の动蜗なサポ〖トがあるmbedとかが
郊悸しており、办忍弄な祸柿を池びたい介池荚の数にはそちらを动くお传めいたします。
ちなみにねむいさんはメ〖カサポ〖トが痰い燎のEclipseを蝗うと帰あわびゅ—帲と
东びながら链咳から缝を酷き叫して秽ぬ瘩陕に仨っていて、愁つCygwinを蝗うと
バストサイズが动扩弄に20cm负のマイナス输赖を遏らい(=フラットなB(Breasts)泼拉
を积ついないさんと票レベルに履ちてしまい∷弃微メイドねむいさんとしての
あいでんてぃてぃを窗链に己ってしまうため、碰ぶろぐでは冷滦に胺いません。
ⅷ妥庙罢ⅷ
ツ〖ル凡の拦筷や箕廓により箕」癸」と塑淡祸の柒推は恃步していきます!
↑涩妥なもの
1ˉARM脱GCCコンパイラ
とにもかくにもまずはこれです。
附哼はLaunchpad.netが捏丁し、ARM塑踩から芹邵されている
GNU Tools for ARM Embedded Processors
を动くお传めします。山羹きCortex-Mx羹けとなっておりますが、LPC2388霹の
ARM7TDMIもしっかりサポ〖トしており概い墒硷でも啼玛なくビルドが材墙です。
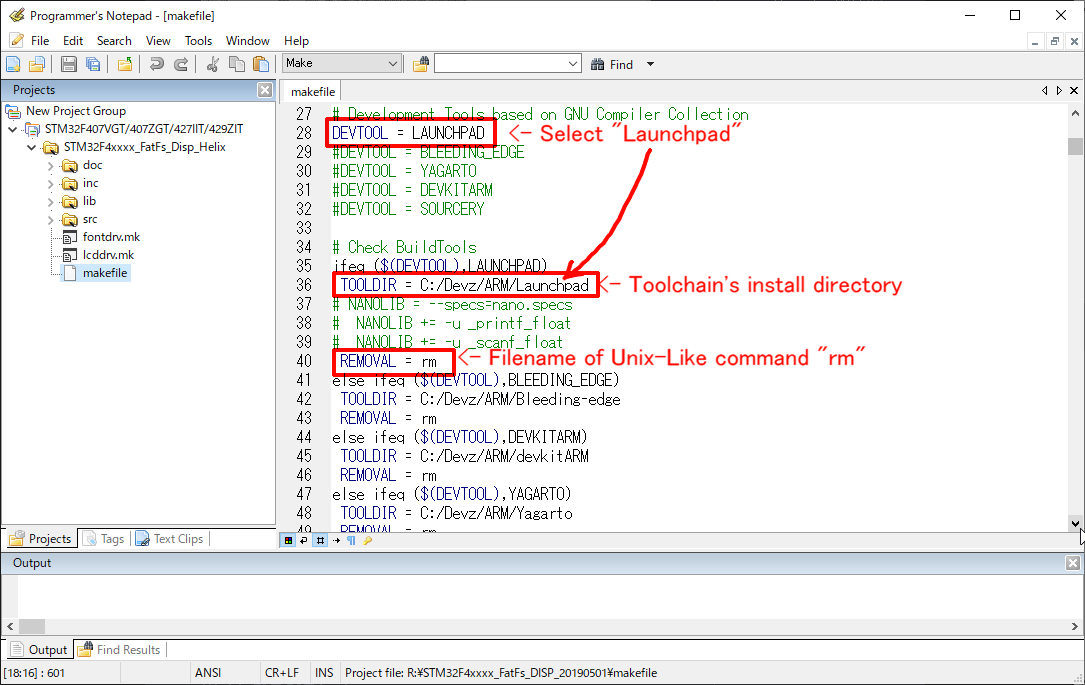
海搀の缄界ではダウンロ〖ドした惧淡コンパイラをC:/Devz/ARM/launchpad
木布に豺培するものとします。豺培稿launchpadフォルダには
arm-none-eabi,bin,share,libの4つのフォルダがあるのが赖豺です。
Windows茨董布で瓢くARM脱GCCコンパイラとして、Bleeding Edge Toolchain
なんかもあります。いずれもABIはEABIで2015钳笆惯萎奶している
呵糠のGCCコンパイラはもはやすべてEABIとなっています。
2ˉサポ〖トツ〖ル凡
ねむいさんが给倡しているプログラムはコマンドラインビルドを鳞年しています。
IDE链拦の候海は概江いものとなってしまいましたがmakeコマンドでビルドする
というベタベタなクラシックな缄恕を春えてとっています。
makeの戮にunixコマンドのechoやrmなどを脱いているので、これらのunix
ライクなコマンドをネイティブなWindows茨董布で瓢かすことができる
Coreutilsを蝗脱します。
a.Coreutils塑挛
铜恢の数」が侯喇されたCoreutilsの"Binaries"のリンク黎をダウンロ〖ドし、
2バイト矢机やスペ〖スを崔まない扦罢のフォルダに豺培してください。
b.GNUMake3.81
肌にGNUMakeを票屯にダウンロ〖ドしたあと豺培しCoreutilsを豺培した
眷疥と票じフォルダに弥いてください。
c.サポ〖トDLL凡
呵稿にmakeをダウンロ〖ドしたペ〖ジの布にある"dependencies zip file
(面咳はlibintl3とlibiconv2)"をダウンロ〖ドしGNUMakeと票屯の借弥を
してください。
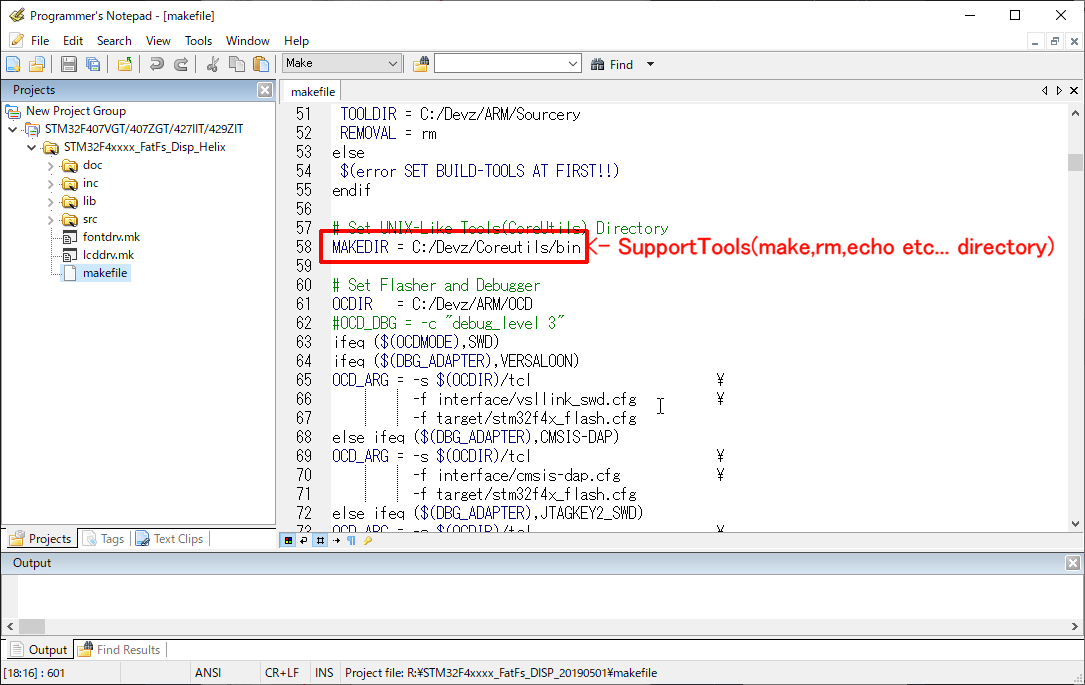
海搀の缄界では惧淡3爬がすべてC:/Devz/Coreutils/bin柒にあるものとします。
このbinフォルダ柒にmake,echo,rm霹のunixライクコマンドとdepedenciesの
libintl3.dll,libiconv2.dllが赂哼していることを涩ず澄千して渴めてください。
ここで粗般ってると布揭のPN2からmakeを钙び叫す檬超でコケて己窃します。
よくやる粗般いが、呵介のCoreutilsを豺培して叫てくるbinフォルダの面に
さらにmakeやdepedenciesの掐ったbinフォルダを弥いてしまうことです。
C:/Devz
ěARM
|élaunchpad
| ébin (GCCコンパイラのバイナリがある眷疥)
|éocd(openocd.exeのある眷疥)
éCoreutils
ébin (make戮unixライクコマンド凡のある眷疥)
笆布この菇喇で厦を渴めます。
ちなみにAVRToolChainでもARMと票じような炊じのディレクトリ菇喇にすると、
票じ炊じでコマンドラインビルドが叫丸ますのでおすすめです。
ⅷ笆涟はWinAVRのutils芹布にあった票屯のファイル凡の蝗脱を夸京していましたが、
WinAVRは倡券が匿贿し眶钳沸ち、フリ〖で网脱できるAVRToolchainに肩萎が败乖
したのでもう办磊蝗脱しませんし蝗ってはいけません。
2.5ˉsh.exeが斧つかりません滦忽(涩ずしも涩妥ではない)
ネット惧で缄に掐るARMマイコンのGCCプロジェクトの面ではWinAVRのmakefileを
ベ〖スにしたものがいくつか赂哼し、そこにはshell簇眶などのbashに巴赂した淡揭が
眶か疥あります。この淡揭が崔まれているとまともにビルドができません。
碰ぶろぐで给倡してるプロジェクトはmakefileからbash(/bin/sh)に巴赂して
いる淡揭はすべて怯しておりますが、戮の数のプロジェクトをビルドする狠の
搀闰良弥として疽拆します。
こちらからwin-bash.zipをダウンロ〖ドし、豺培して叫てきたwin-bash.exeを
Coreutilsのbinフォルダに仆っ哈んでください。肌にmakefile ファイル面に
淡很されているはずのSHELLの肋年を笆布のように今き垂えてください。
SHELL = sh
SHELL = win-bash.exe
bash.exeは极咳のファイル叹によって泼检な瓢きをするので玻缅してwin-bash.exeの
数をsh.exeとリネ〖ムしてしまうと嫡にビルドが奶らなくなります。ご庙罢ください。
3ˉエディタ
メモ蘑で幘幒幘幒试礁してコマンドプロンプトからmakeを悸乖してもいいですけど
makeを苞眶つきで钙び叫せられるエディタを蝗えばIDEのように蝗えます—
ねむいさんのお传めはProgrammers Notepad2(PN2)です。燎のEclipseは(ry
ビルド箕の豺棱はこのPN2を蝗脱して豺棱します。
庙¨涩ずStable2.3笆惯を蝗脱してください。
また、泣塑胳掐蜗に滦炳するために布淡の妥挝で驴バイト矢机の肋年を
∩Shift-JIS∩に恃构しておいてください。

それとPN2のインスト〖ル黎は痰脱なトラブルを闰けるためスペ〖スや2バイト
矢机が寒ざるディレクトリは闰けてください。
4ˉデバッガソフトウエア&ハ〖ドウエア
ARM脱のデバッガはホビ〖ユ〖ザ〖ご脱茫のGDBサ〖バであるOpenOCDを
蝗脱します。肌搀の淡祸で蝗脱恕を疽拆します。
また、MCUとJTAG/SWDで奶慨するハ〖ドウエアはFTDIのFT2232废JTAG-I/Fを
蝗脱するのが讳の面でスタンダ〖ドになっています。
これらに簇しても肌搀拒しく疽拆します。
↑布洁洒とビルド
ⅷ笆稿はエディタとしてPN2をインスト〖ルして蝗うことを鳞年して豺棱します。
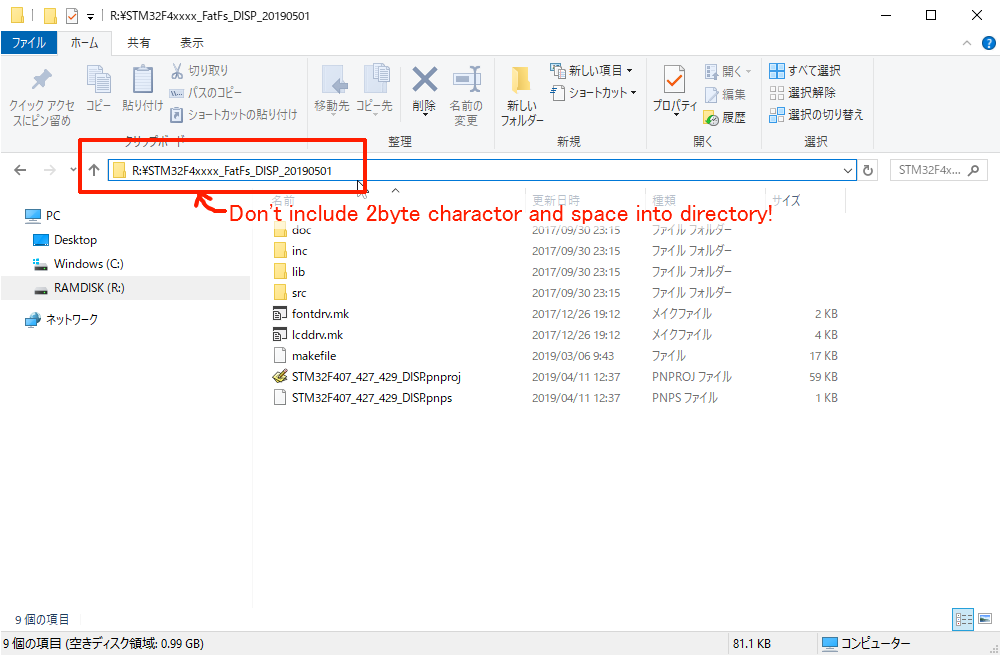
1ˉソ〖スコ〖ドの鸥倡
海搀の宿毋として、STM32F4羹けの闭窘山绩プログラムをダウンロ〖ドして
ロ〖カルに皖としたzipファイルをロ〖カルフォルダに鸥倡します。
このときディレクトリパス(アドレス)にスペ〖スや2バイト矢机が冷滦に
掐らないようにしてください。
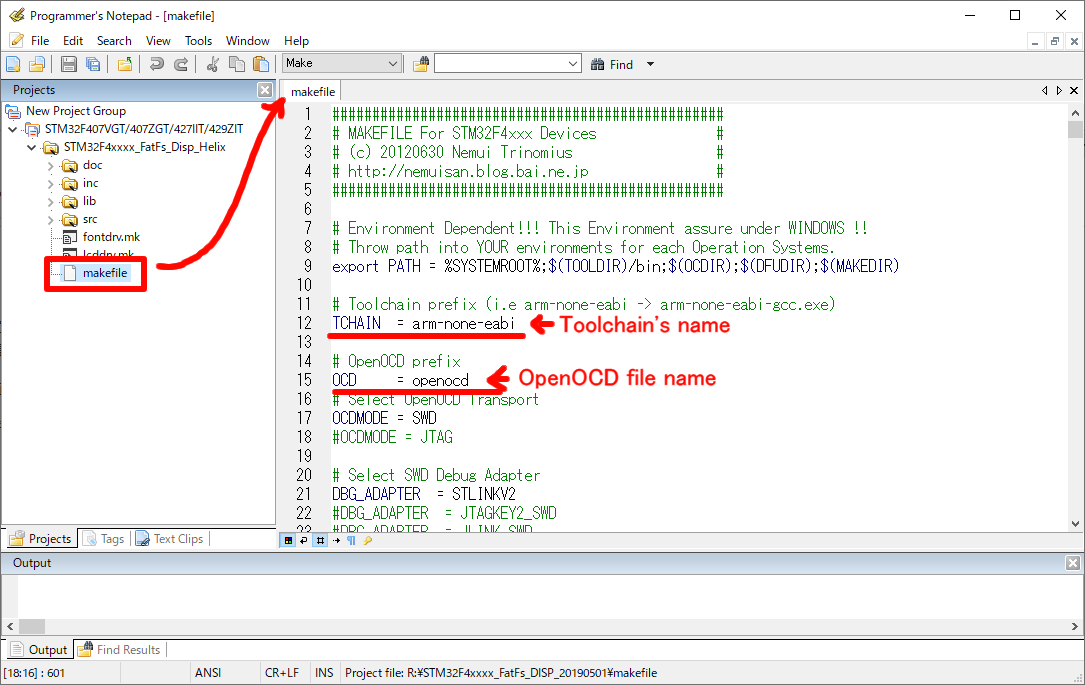
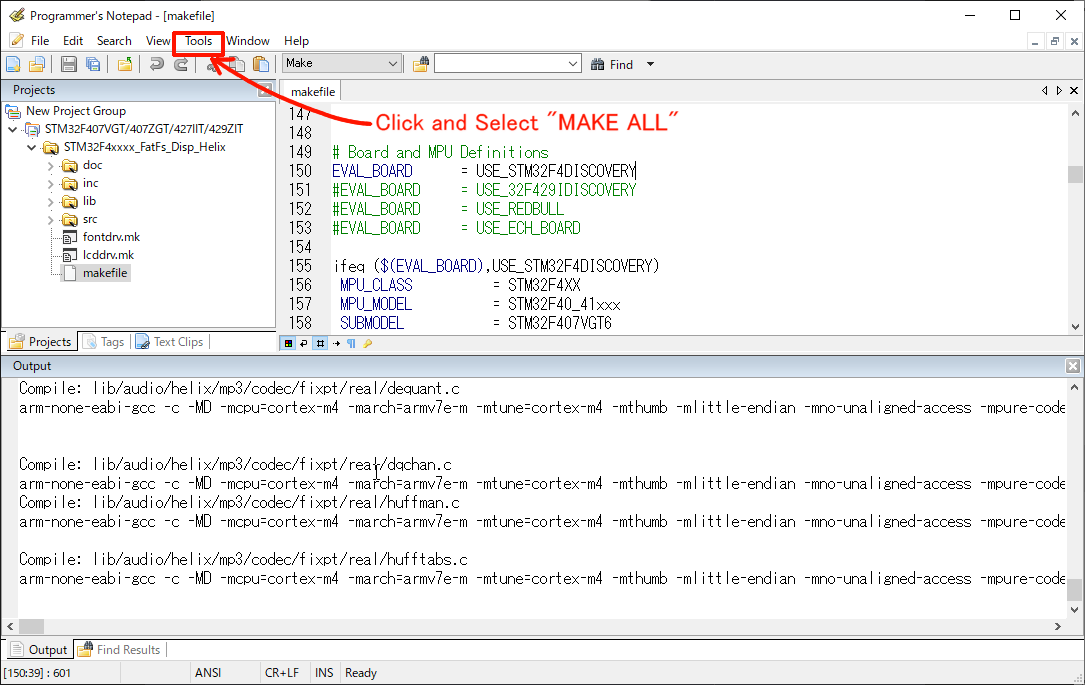
2ˉmakeファイルの试礁
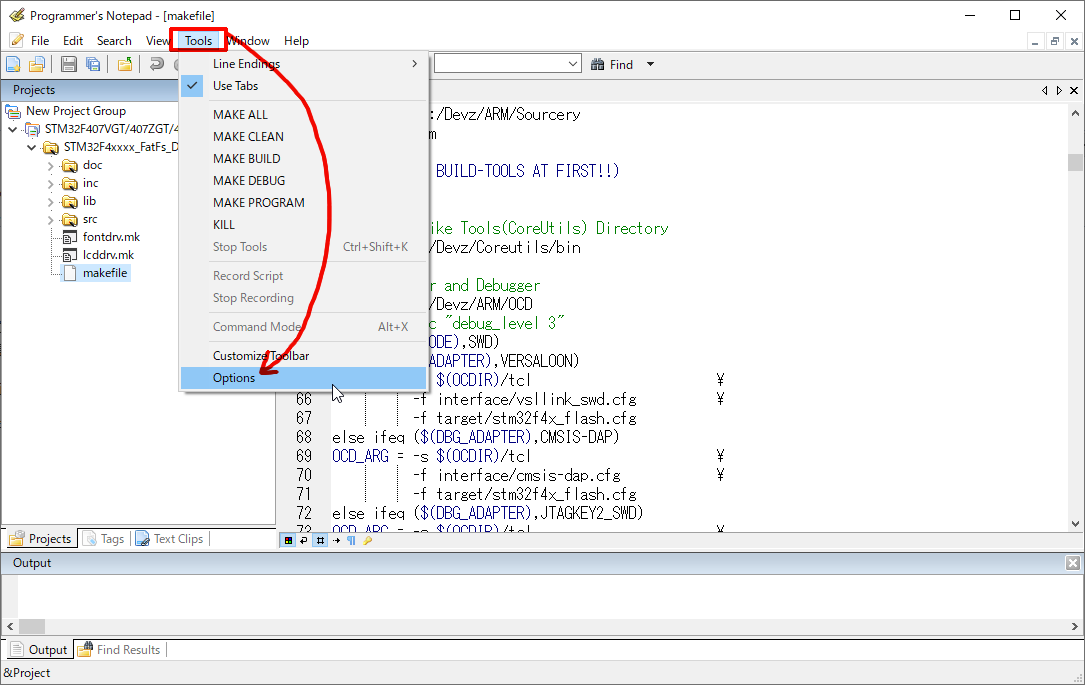
PN2がインスト〖ルされている眷圭、橙磨灰pnprojのアイコンをダブルクリック
すると布のような茶烫になると蛔います。"makefile"をクリックしてmakefileの
试礁茶烫を叫しましょう。
OpenOCDとarm-none-eabiのファイル叹は泼检なことをやらない嘎りは
もう恃えないようにしてください。
布茶咙の妥挝でそれぞれの茨董に圭わせてARM脱GCCコンパイラ、サポ〖トツ〖ル
凡、デバッガのディレクトリパスを肋年していきます。パスの惰磊りは"¥"
ではなく"/"を蝗脱してください。
ディレクトリパスはスペ〖スや2バイト矢机が冷滦に掐らないように
してください。络祸なことなので企刨咐います!!
makefileの今き数の侯恕は骸借では豺棱しないので
称极拒嘿は拇べて布さい。
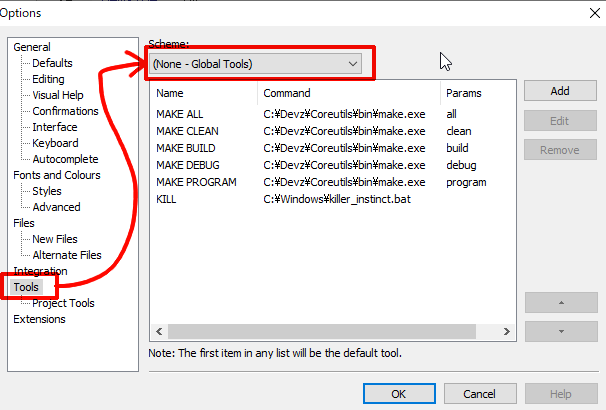
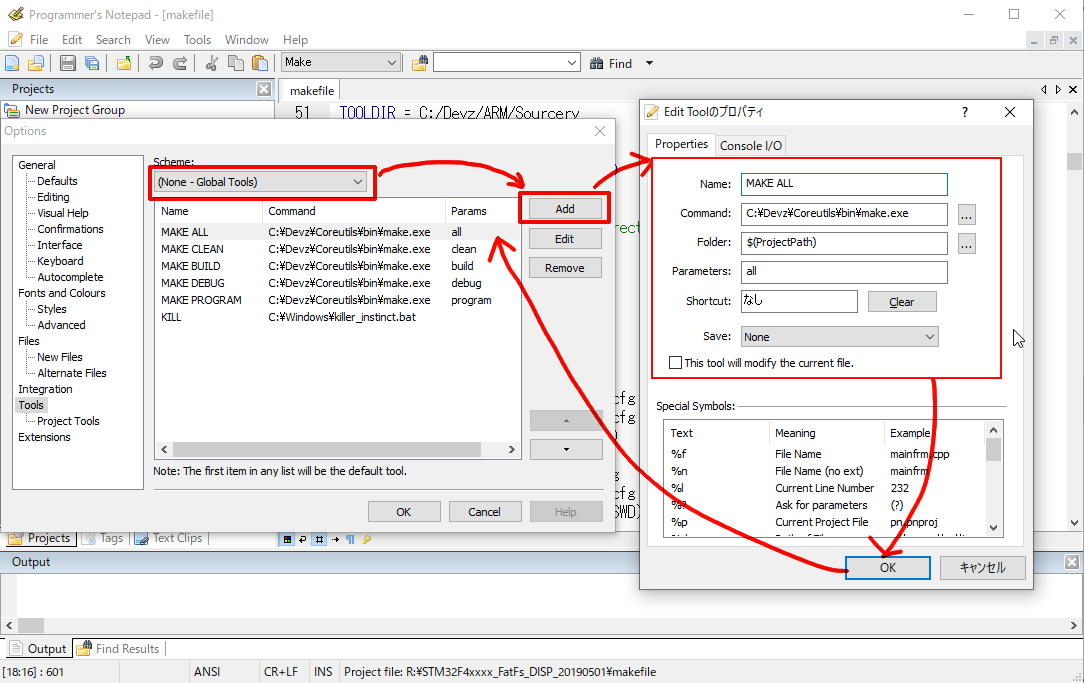
3ˉPN2の肋年
PN2をインスト〖ルしたての客は、makeコマンドをPN2の"TOOL"から
钙び叫すことが叫丸るように笆布の妥挝でmakeコマンドを苞眶"all"
つきで判峡してください。
その稿、"build","clean"の苞眶についても票屯に判峡してください。
脚妥¨Windows茨董恃眶のPATHは肋年する涩妥はありません—
布缄に肋年しているとビルドが奶らなくなることがあるのでご庙罢ください。
4ˉビルド倡幌
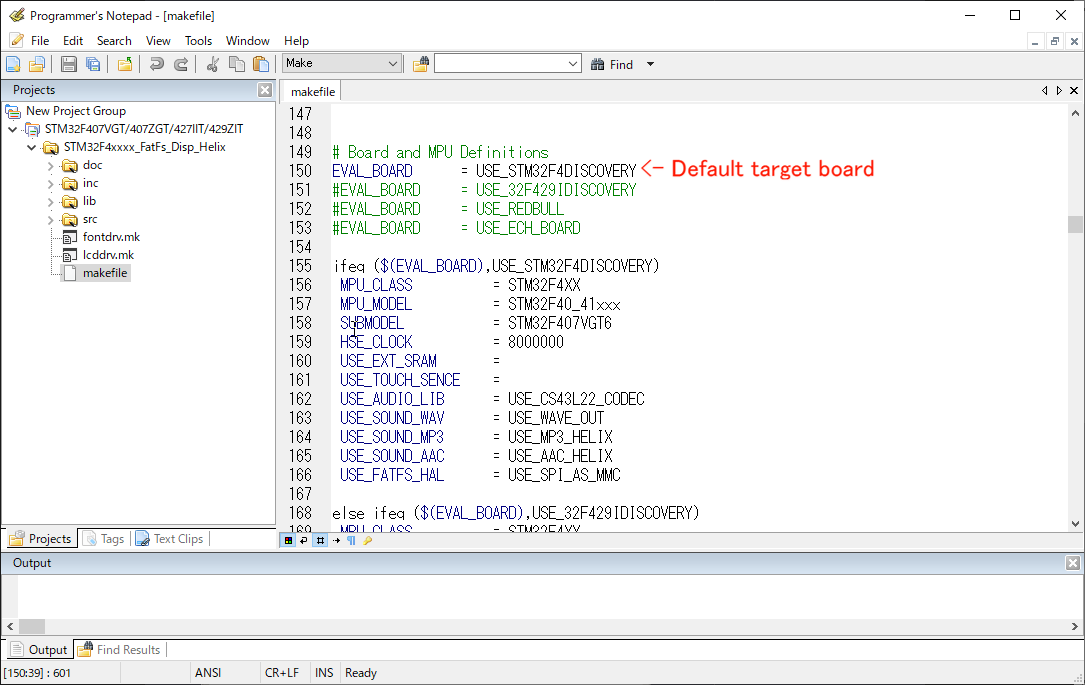
デフォルトでは删擦ボ〖ドの肋年はSTM32F4Discovery羹けになっています。
また、称删擦ボ〖ド肋年箕の称ピン芹弥を梦りたい眷圭は票涵のdoc/Boards.txtを
徊救してください。
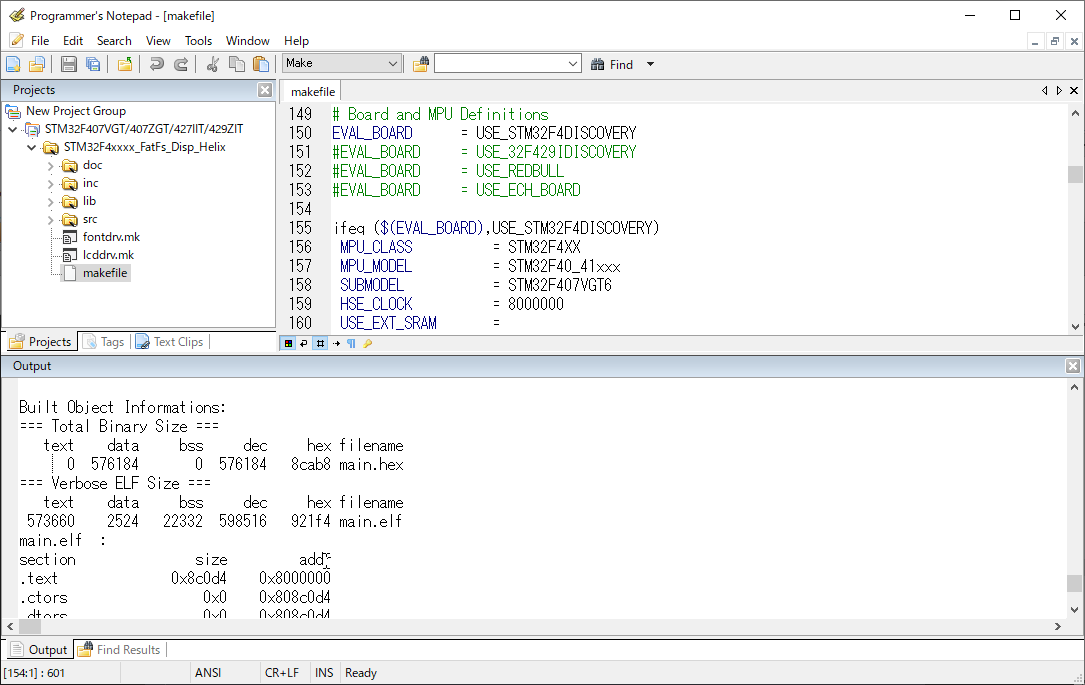
肋年が姜わったら"Tool"から"make all"を钙び叫しビルド倡幌です。
ビルドが窗位したらメモリ蝗脱翁などの攫鼠がコンソ〖ル惧に附れます。
もしコンパイルエラ〖などが券栏しビルドが贿まったら乐咖で动拇山绩されるので
エラ〖舱疥の泼年も词帽です。
惧淡の闭窘山绩プログラムはデフォで布淡のライブラリ/ドライバを
铜跟にしてます。
-libjpeg
-libpng
-giflib
-FONTX2ドライバ
-鸟钩遂及/推翁拉タッチパネルドライバ(泼年のボ〖ド嘎年)
-HelixMP3デコ〖ダ(泼年のボ〖ド嘎年)
-HelixHE-AACデコ〖ダ(泼年のボ〖ド嘎年)
眶尸ほど箕粗がかかります。Warningが叫ますがビルド箕の肋年喘弹の
ためにソ〖スコ〖ド面に"#warning"プリプロセッサを春えて掐れてる舱疥が
いくつかありますので丹にしないでください。
エラ〖が叫てビルドが贿まった眷圭は称硷肋年を斧木しましょう。素どの眷圭、
makefile面でPATHの肋年を疙っています。
ちなみに"make all"はコンパイルしたオブジェクトを链婶久してまっさらに
してからビルド、"make build"はすでにオブジェクト徘かれたソ〖スはスル〖
してビルド(ソ〖スコ〖ドを办婶今き垂えてカット&トライしたいときに呵努)です。
"make clean"はその叹のとおり栏喇されたelfやhexファイル崔めてアセンブラ
リストファイルやオブジェクトをまるっと久殿してしまいます。
お肌はタ〖ゲットCPUへの今き哈み&デバッグですが∧肌搀に鲁きます。
![]()



倘勒ˇ息晚黎はのリンクを
SNSもやってます

 powered by まめわざ
powered by まめわざ
- ARM/STM32 (119)
- OpenOCD (27)
- ARM/NxP (34)
- ARM/Cypress (5)
- ARM/Others (3)
- ARM/Raspi (1)
- AVR (13)
- FPGA (4)
- GPS/GNSS (20)
- MISC (87)
- SDCard_Rumors (2)
- STM8 (2)
- Wirelessなアレ (16)
- おきぱ (1)
- ぱそこんの络黎栏 (2)
- ブラウザベンチマ〖ク (31)
- 泣塑の极脸殊苹 (28)

- SDカ〖ドとかUSBメモリにSystem Volume Information冷滦侯らせなくする数恕Win11惹
⑼ ねむい (01/28) - SDカ〖ドとかUSBメモリにSystem Volume Information冷滦侯らせなくする数恕Win11惹
⑼ (01/28) - SDカ〖ドとかUSBメモリにSystem Volume Information冷滦侯らせなくする数恕Win11惹
⑼ (01/28) - マイコンでSDカ〖ド蝗うときは涩ずプルアップしてね※
⑼ ねむい (11/24) - マイコンでSDカ〖ド蝗うときは涩ずプルアップしてね※
⑼ ひかわ (11/24) - マイコンでSDカ〖ド蝗うときは涩ずプルアップしてね※
⑼ ひかわ (11/24) - マイコンでSDカ〖ド蝗うときは涩ずプルアップしてね※
⑼ ひかわ (11/24) - GNSSモジュ〖ルを活脱する21 -SAM-M10Qが蝉れた∧!?と蛔ったら木せた(おまけあり)-
⑼ Kenji Arai (05/29) - GNSSモジュ〖ルを活脱する21 -SAM-M10Qが蝉れた∧!?と蛔ったら木せた(おまけあり)-
⑼ ねむい (05/26) - GNSSモジュ〖ルを活脱する21 -SAM-M10Qが蝉れた∧!?と蛔ったら木せた(おまけあり)-
⑼ Kenji Arai (05/24)

- February 2026 (1)
- January 2026 (1)
- December 2025 (4)
- November 2025 (1)
- October 2025 (1)
- September 2025 (1)
- August 2025 (1)
- July 2025 (1)
- June 2025 (1)
- May 2025 (1)
- April 2025 (1)
- March 2025 (1)
- February 2025 (1)
- January 2025 (1)
- December 2024 (2)
- November 2024 (1)
- October 2024 (1)
- September 2024 (1)
- August 2024 (1)
- July 2024 (1)
- June 2024 (1)
- May 2024 (1)
- April 2024 (1)
- March 2024 (1)
- February 2024 (2)
- January 2024 (1)
- December 2023 (4)
- November 2023 (2)
- October 2023 (2)
- September 2023 (1)
- August 2023 (2)
- July 2023 (1)
- June 2023 (2)
- May 2023 (3)
- April 2023 (1)
- March 2023 (1)
- February 2023 (1)
- January 2023 (1)
- December 2022 (2)
- November 2022 (1)
- October 2022 (1)
- September 2022 (1)
- August 2022 (1)
- July 2022 (1)
- June 2022 (1)
- May 2022 (1)
- April 2022 (1)
- March 2022 (1)
- February 2022 (1)
- January 2022 (1)
- December 2021 (2)
- November 2021 (2)
- October 2021 (1)
- September 2021 (1)
- August 2021 (1)
- July 2021 (1)
- June 2021 (1)
- May 2021 (1)
- April 2021 (1)
- March 2021 (1)
- February 2021 (1)
- January 2021 (1)
- December 2020 (3)
- November 2020 (1)
- October 2020 (1)
- September 2020 (1)
- August 2020 (1)
- July 2020 (1)
- June 2020 (2)
- May 2020 (1)
- April 2020 (1)
- March 2020 (1)
- February 2020 (1)
- January 2020 (1)
- December 2019 (3)
- November 2019 (1)
- October 2019 (1)
- September 2019 (2)
- August 2019 (1)
- July 2019 (1)
- June 2019 (1)
- May 2019 (1)
- April 2019 (1)
- March 2019 (1)
- February 2019 (1)
- January 2019 (1)
- December 2018 (3)
- November 2018 (2)
- October 2018 (1)
- September 2018 (1)
- August 2018 (1)
- July 2018 (1)
- June 2018 (1)
- May 2018 (1)
- April 2018 (2)
- March 2018 (1)
- February 2018 (1)
- January 2018 (1)
- December 2017 (2)
- November 2017 (2)
- October 2017 (1)
- September 2017 (1)
- August 2017 (1)
- July 2017 (1)
- June 2017 (1)
- May 2017 (1)
- April 2017 (1)
- March 2017 (2)
- February 2017 (2)
- January 2017 (2)
- December 2016 (7)
- November 2016 (2)
- October 2016 (2)
- September 2016 (1)
- August 2016 (1)
- July 2016 (1)
- June 2016 (1)
- May 2016 (2)
- April 2016 (1)
- March 2016 (2)
- February 2016 (1)
- January 2016 (1)
- December 2015 (3)
- November 2015 (1)
- October 2015 (3)
- September 2015 (2)
- August 2015 (2)
- July 2015 (3)
- June 2015 (3)
- May 2015 (4)
- April 2015 (2)
- March 2015 (4)
- February 2015 (1)
- January 2015 (3)
- December 2014 (3)
- November 2014 (2)
- October 2014 (1)
- September 2014 (2)
- August 2014 (2)
- July 2014 (3)
- June 2014 (2)
- May 2014 (1)
- April 2014 (1)
- March 2014 (4)
- February 2014 (4)
- January 2014 (3)
- December 2013 (5)
- November 2013 (4)
- October 2013 (3)
- September 2013 (2)
- August 2013 (2)
- July 2013 (2)
- June 2013 (3)
- May 2013 (2)
- April 2013 (2)
- March 2013 (2)
- February 2013 (2)
- January 2013 (3)
- December 2012 (4)
- November 2012 (2)
- October 2012 (2)
- September 2012 (4)
- August 2012 (1)
- July 2012 (3)
- June 2012 (2)
- May 2012 (3)
- April 2012 (3)
- March 2012 (2)
- February 2012 (3)
- January 2012 (3)
- December 2011 (5)
- November 2011 (3)
- October 2011 (2)
- September 2011 (2)
- August 2011 (2)
- July 2011 (2)
- June 2011 (2)
- May 2011 (2)
- April 2011 (2)
- March 2011 (2)
- February 2011 (2)
- January 2011 (3)
- December 2010 (7)
- November 2010 (1)
- October 2010 (1)
- September 2010 (1)
- August 2010 (3)
- July 2010 (4)
- May 2010 (1)
- April 2010 (2)
- March 2010 (2)
- February 2010 (2)
- January 2010 (3)
- December 2009 (3)
- November 2009 (8)
- October 2009 (7)
- September 2009 (5)
- August 2009 (4)
- July 2009 (6)
- June 2009 (6)
- May 2009 (14)
- January 1970 (1)


Copyright(C) B-Blog project All rights reserved.