Windows10�б����̥���ץ��ARM�ޥ������GCC�ӥ�ɴĶ����ۤ���(2020ǯ����)
OpenOCD for Windows is HERE!
���ͤत����ϼ����ӥ�ɤ�OpenOCD�Х��ʥ�������Ƥޤ���
������Ϥ��ΥХ��ʥ���ˤ�����ޤ��Τ�4649!
��������Windows�Ķ����ˤ�����ARM�ޥ�����γ�ȯ�Ķ����ۤ��ܻؤ��ƤϤ���ޤ���
�䤬�������Ƥ���ץ��������Ȥ�ӥ��/�ǥХå����뤿���ɬ�פʺǾ��¤μ���
����Ȥ������֤Ť��Ǥ���
�Ϥä�������ޤ�����ؼԸ����β���ǤϤ���ޤ�������Ū�ʸ��ΰ�̣��
GNUMake���Ȥ������ޥ�ɥ饤��ӥ�ɤ���ˡ����Τ��Ƥ���������ä�ʤ�ޤ���
2019ǯ���ߤ�̵����Eclipse�١����γ�ȯ�Ķ�GNUARMECLIPSE��
STM32����ǥե뵡ǽ���Ȥ���Atollic TrueStudio��MDK-ARM��2�ʼ
�����ƥ���饤��ѥ���+�饤�֥�����ζ��Ϥʥ��ݡ��Ȥ�����mbed�Ȥ���
���¤��Ƥ��ꡢ����Ū�ʻ�����ؤӤ�����ؼ������ˤϤ�����������ᤤ�����ޤ���
���ʤߤˤͤत����ϥ�����ݡ��Ȥ�̵���Ǥ�Eclipse��Ȥ��Ȏ�����Ӥ塪����
���Ӥʤ������Ȥ��������Ф��ƻ�̴��¤����äƤ��ơ����Cygwin��Ȥ���
�Х��ȥ�����������Ū��20cm���Υޥ��ʥ���������餤(=�ե�åȤ�B(Breasts)����
����Ĥ��ʤ�������Ʊ��٥���Ĥ��Ƥ��ޤ������ᥤ�ɤͤत����Ȥ��Ƥ�
�����Ǥ�Ƥ��Ƥ������˼��äƤ��ޤ����ᡢ���֤����Ǥ����Ф������ޤ���
���������բ�
�������ġ��뷲�����������ˤ���������ܵ��������Ƥ��Ѳ����Ƥ����ޤ�!
��ɬ�פʤ��
������ARM��GCC����ѥ���
�����Ȥˤ⤫���ˤ�ޤ��Ϥ���Ǥ���
�������ߤ�Launchpad.net������ARM�ܲȤ������ۤ���Ƥ���
����GNU Tools for ARM Embedded Processors
�����������ᤷ�ޤ���ɽ����Cortex-Mx�����ȤʤäƤ���ޤ�����LPC2388����
����ARM7TDMI�⤷�ä��ꥵ�ݡ��Ȥ��Ƥ���Ť��ʼ�Ǥ�����ʤ��ӥ�ɤ���ǽ�Ǥ���
��������μ��Ǥϥ���������ɤ����嵭����ѥ����C:/Devz/ARM/launchpad
����ľ���˲��ह���ΤȤ��ޤ��������launchpad�ե�����ˤ�
����arm-none-eabi,bin,share,lib��4�ĤΥե����������Τ�����Ǥ���
����Windows�Ķ�����ư��ARM��GCC����ѥ���Ȥ��ơ�Bleeding Edge Toolchain
�����ʤ⤢��ޤ����������ABI��EABI��2015ǯ�ʹ�ή�̤��Ƥ���
�����ǿ���GCC����ѥ���Ϥ�Ϥ䤹�٤�EABI�ȤʤäƤ��ޤ���
���������ݡ��ȥġ��뷲
�����ͤत���������Ƥ���ץ������ϥ��ޥ�ɥ饤��ӥ�ɤ����ꤷ�Ƥ��ޤ���
����IDE�����κϸŽ�����ΤȤʤäƤ��ޤ��ޤ�����make���ޥ�ɤǥӥ�ɤ���
�����Ȥ����٥��٥��ʥ��饷�å��ʼ�ˡ���ƤȤäƤ��ޤ���
����make��¾��unix���ޥ�ɤ�echo��rm�ʤɤ��Ѥ��Ƥ���Τǡ�������unix
�����饤���ʥ��ޥ�ɤ�ͥ��ƥ��֤�Windows�Ķ�����ư�������Ȥ��Ǥ���
����Coreutils����Ѥ��ޤ���
����a.Coreutils����
���� ͭ�֤��������������줿Coreutils��"Binaries"�Υ��������������ɤ���
���� 2�Х���ʸ���䥹�ڡ�����ޤޤʤ�Ǥ�դΥե�����˲��ष�Ƥ���������
����b.GNUMake3.81
���� ����GNUMake��Ʊ�ͤ˥���������ɤ������Ȳ��षCoreutils����ष��
���� ����Ʊ���ե�������֤��Ƥ���������
����c.���ݡ���DLL��
���� �Ǹ��make�����������ɤ����ڡ����β��ˤ���"dependencies zip file
���� (��Ȥ�libintl3��libiconv2)"�����������ɤ�GNUMake��Ʊ�ͤν��֤�
�������Ƥ���������
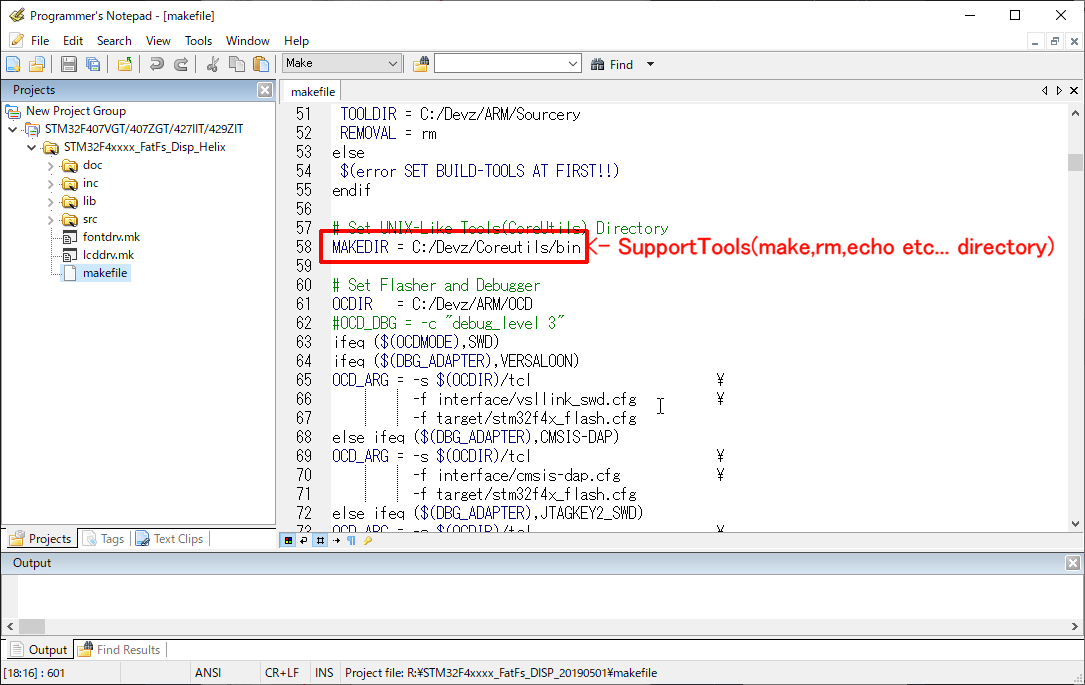
��������μ��ǤϾ嵭3�������٤�C:/Devz/Coreutils/bin��ˤ����ΤȤ��ޤ���
��������bin�ե�������make,echo,rm����unix�饤�����ޥ�ɤ�depedencies��
����libintl3.dll,libiconv2.dll��¸�ߤ��Ƥ��뤳�Ȥ�ɬ����ǧ���ƿʤ�Ƥ���������
���������Ǵְ�äƤ�����Ҥ�PN2����make��ƤӽФ��ʳ��ǥ����Ƽ��Ԥ��ޤ���
����
�����褯���ְ㤤�����ǽ��Coreutils����ष�ƽФƤ���bin�ե���������
���������make��depedencies�����ä�bin�ե�������֤��Ƥ��ޤ����ȤǤ���
��
C:/Devz
��������ARM
������ |��launchpad
������ |����bin��(��GCC����ѥ���ΥХ��ʥ꤬������)
������ |��ocd(��openocd.exe������)
������ ��Coreutils
������ ��bin��(��make¾unix�饤�����ޥ�ɷ��Τ�����)
�����������ʲ����ι������ä�ʤ�ޤ���
�������ʤߤ�AVRToolChain�Ǥ�ARM��Ʊ���褦�ʴ����Υǥ��쥯�ȥ깽���ˤ���ȡ�
����Ʊ�������ǥ��ޥ�ɥ饤��ӥ�ɤ�����ޤ��ΤǤ�������Ǥ���
������������WinAVR��utils�۲��ˤ��ä�Ʊ�ͤΥե����뷲�λ��Ѥ�侩���Ƥ��ޤ�������
������WinAVR�ϳ�ȯ����ߤ���ǯ�Ф����ե�����ѤǤ���AVRToolchain�˼�ή���ܹ�
�����������ΤǤ⤦���ڻ��Ѥ��ޤ��ȤäƤϤ����ޤ���
����.����sh.exe�����Ĥ���ޤ����к�(ɬ������ɬ�פǤϤʤ�)
�����ͥåȾ�Ǽ������ARM�ޥ������GCC�ץ��������Ȥ���Ǥ�WinAVR��makefile��
�����١����ˤ�����Τ������Ĥ�¸�ߤ��������ˤ�shell�ؿ��ʤɤ�bash�˰�¸�������Ҥ�
���������ꤢ��ޤ������ε��Ҥ��ޤޤ�Ƥ�����ޤȤ�˥ӥ�ɤ��Ǥ��ޤ�����
�������֤����Ǹ������Ƥ�ץ��������Ȥ�makefile����bash(/bin/sh)�˰�¸����
�������뵭�ҤϤ��٤��Ӥ��Ƥ���ޤ�����¾�����Υץ��������Ȥ�ӥ�ɤ���ݤ�
�����������֤Ȥ��ƾҲ𤷤ޤ���
��������������win-bash.zip�����������ɤ������ष�ƽФƤ���win-bash.exe��
����Coreutils��bin�ե�������ͤù���Ǥ�������������makefile���ե��������
�������ܤ���Ƥ���Ϥ���SHELL�������ʲ��Τ褦�˽����Ƥ���������
����SHELL = sh
������
����SHELL = win-bash.exe
����bash.exe�ϼ��ȤΥե�����̾�ˤ�ä��ü��ư����Τ����夷��win-bash.exe��
��������sh.exe�ȥ�͡��ष�Ƥ��ޤ��ȵդ˥ӥ�ɤ��̤�ʤ��ʤ�ޤ��������դ���������
���������ǥ���
�������Ģ�ǎ��������Խ����ƥ��ޥ�ɥץ���ץȤ���make��¹Ԥ��Ƥ⤤���Ǥ�����
����make������Ĥ��ǸƤӽФ����륨�ǥ�����Ȥ���IDE�Τ褦�˻Ȥ��ޤ���
�����ͤत����Τ������Programmers Notepad2(PN2)�Ǥ����Ǥ�Eclipse��(ry
�����ӥ�ɻ��β���Ϥ���PN2����Ѥ��Ʋ��⤷�ޤ���
��������ɬ��Stable2.3�ʹߤ���Ѥ��Ƥ���������
���������ޤ������ܸ����Ϥ��б����뤿��˲��������Τ�¿�Х���ʸ���������
����������Shift-JIS�ɤ��ѹ����Ƥ����Ƥ���������
������

���������PN2�Υ��ȡ������̵�Ѥʥȥ�֥���뤿��ڡ�����2�Х���
����ʸ����������ǥ��쥯�ȥ���Ƥ���������
�������ǥХå����եȥ�����&�ϡ��ɥ�����
����ARM�ѤΥǥХå��ϥۥӡ��桼��������ã��GDB�����ФǤ���OpenOCD��
�������Ѥ��ޤ�������ε����ǻ���ˡ��Ҳ𤷤ޤ���
�����ޤ���MCU��JTAG/SWD���̿�����ϡ��ɥ�������FTDI��FT2232��JTAG-I/F��
�������Ѥ���Τ������ǥ���������ɤˤʤäƤ��ޤ���
���������˴ؤ��Ƥ�����ܤ����Ҳ𤷤ޤ���
���������ȥӥ��
�����ʸ�ϥ��ǥ����Ȥ���PN2�ȡ��뤷�ƻȤ����Ȥ����ꤷ�Ʋ��⤷�ޤ���
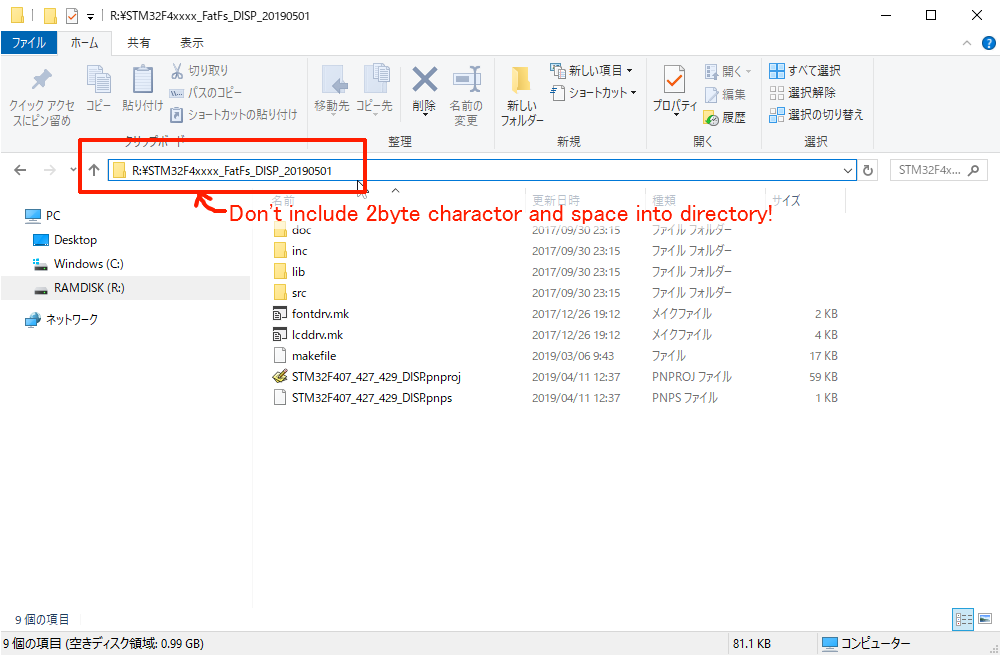
�����������������ɤ�Ÿ��
�������������Ȥ��ơ�STM32F4�����αվ�ɽ���ץ�����������������ɤ���
���������������Ȥ���zip�ե�������������ե������Ÿ�����ޤ���
�������ΤȤ��ǥ��쥯�ȥ�ѥ�(���ɥ쥹)�˥��ڡ����䣲�Х���ʸ�������Ф�
��������ʤ��褦�ˤ��Ƥ���������
����
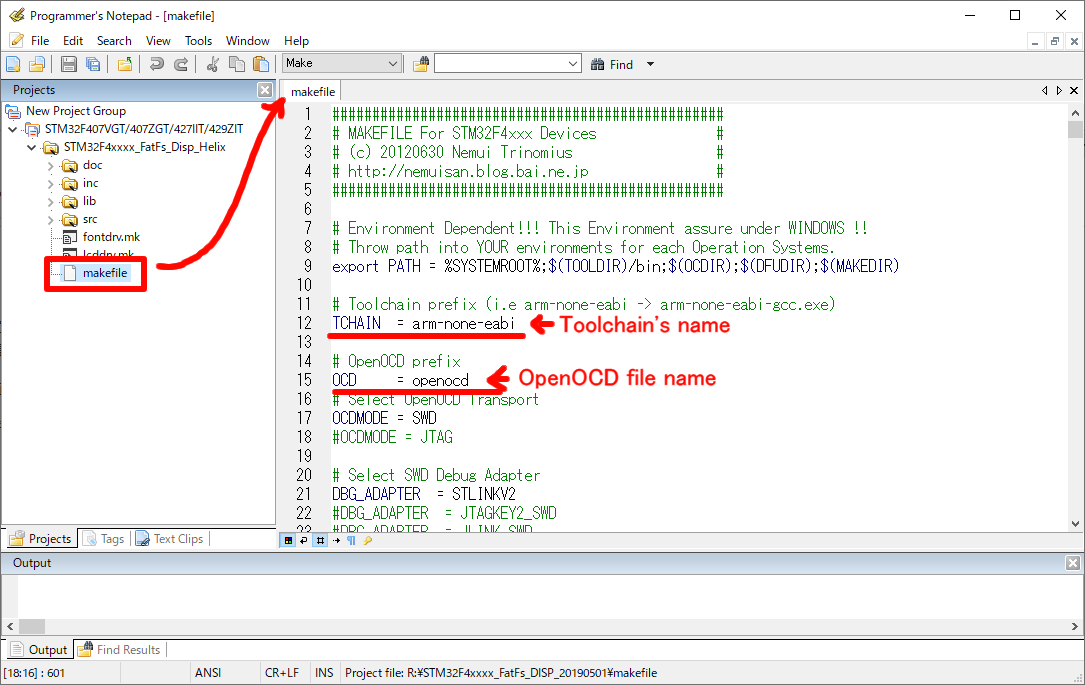
������make�ե�������Խ�
����PN2�����ȡ��뤵��Ƥ����硢��ĥ��pnproj�Υ����������֥륯��å�
��������Ȳ��Τ褦�ʲ��̤ˤʤ�Ȼפ��ޤ���"makefile"��å�����makefile��
�����Խ����̤�Ф��ޤ��礦��
����
����OpenOCD��arm-none-eabi�Υե�����̾���ü�ʤ��Ȥ���ʤ��¤��
�����⤦�Ѥ��ʤ��褦�ˤ��Ƥ���������
����
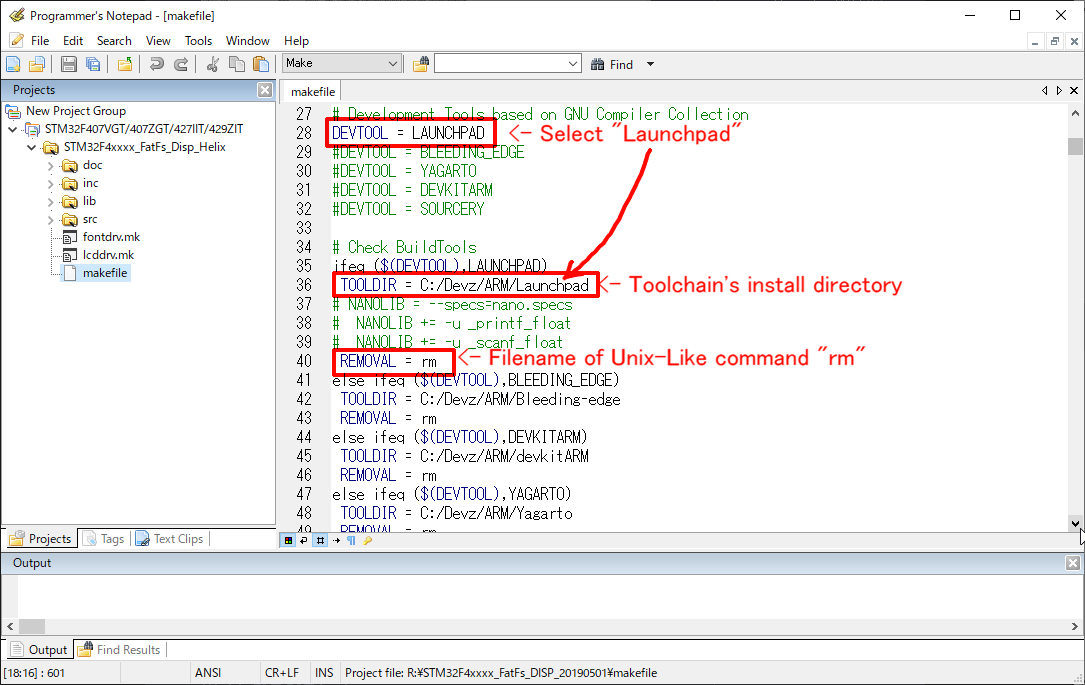
���������������ΤǤ��줾��δĶ��˹�碌��ARM��GCC����ѥ��顢���ݡ��ȥġ���
���������ǥХå��Υǥ��쥯�ȥ�ѥ������ꤷ�Ƥ����ޤ����ѥ��ζ��ڤ��"¥"
�����ǤϤʤ�"/"����Ѥ��Ƥ���������
�����ǥ��쥯�ȥ�ѥ��ϥ��ڡ����䣲�Х���ʸ�������Ф�����ʤ��褦��
�������Ƥ�������������ʤ��ȤʤΤ����ٸ����ޤ�!!
����
����
����makefile�ν����κ�ˡ�Ϻ���Ǥϲ��⤷�ʤ��Τ�
�����Ƽ��ܺ٤�Ĵ�٤Ʋ�������
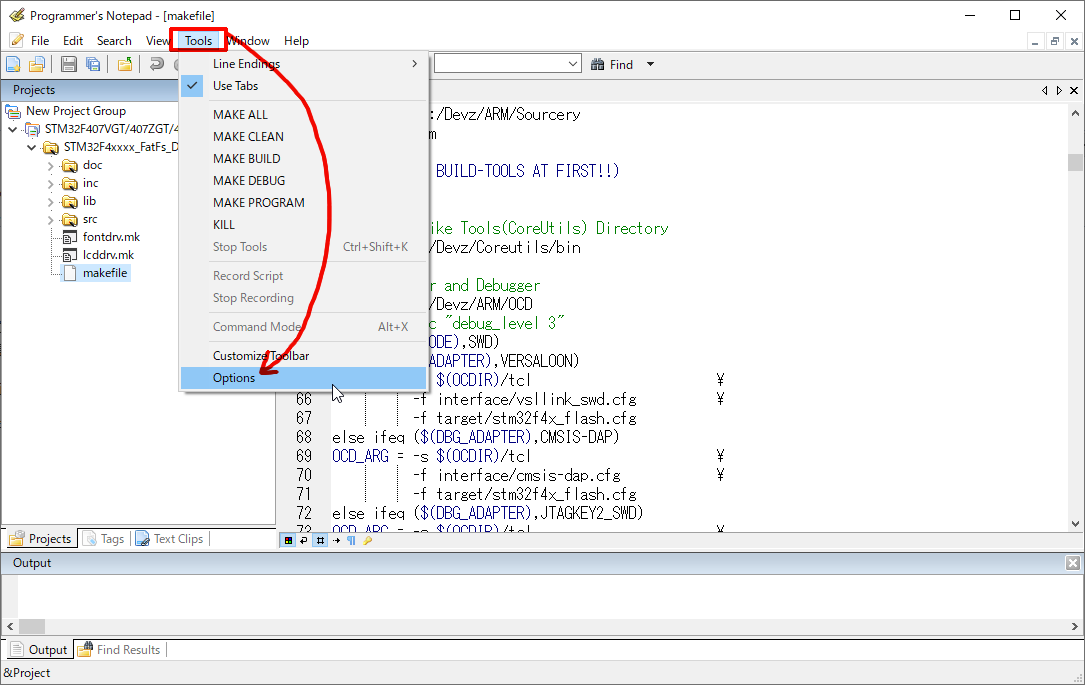
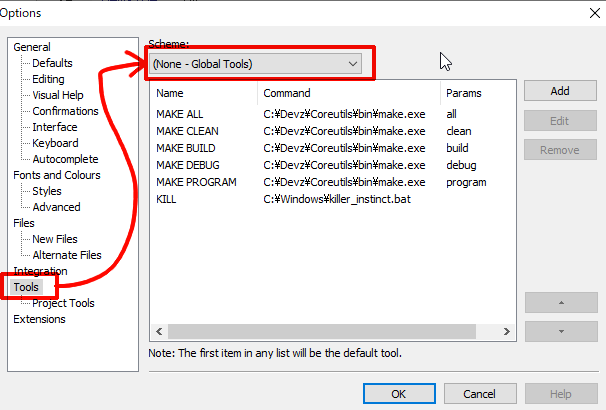
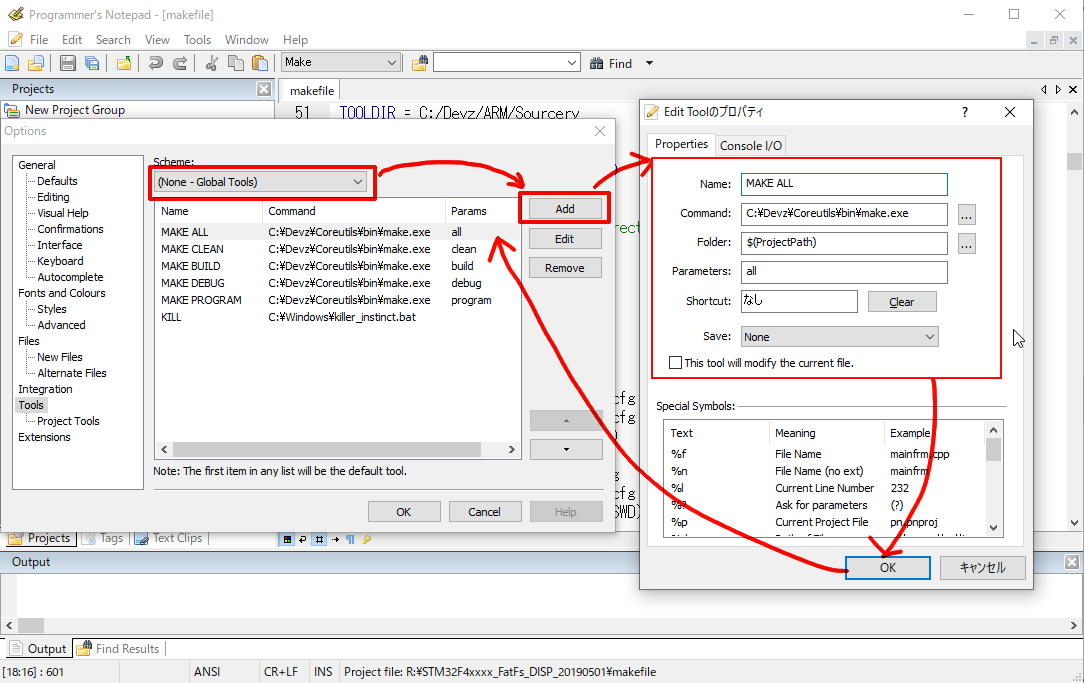
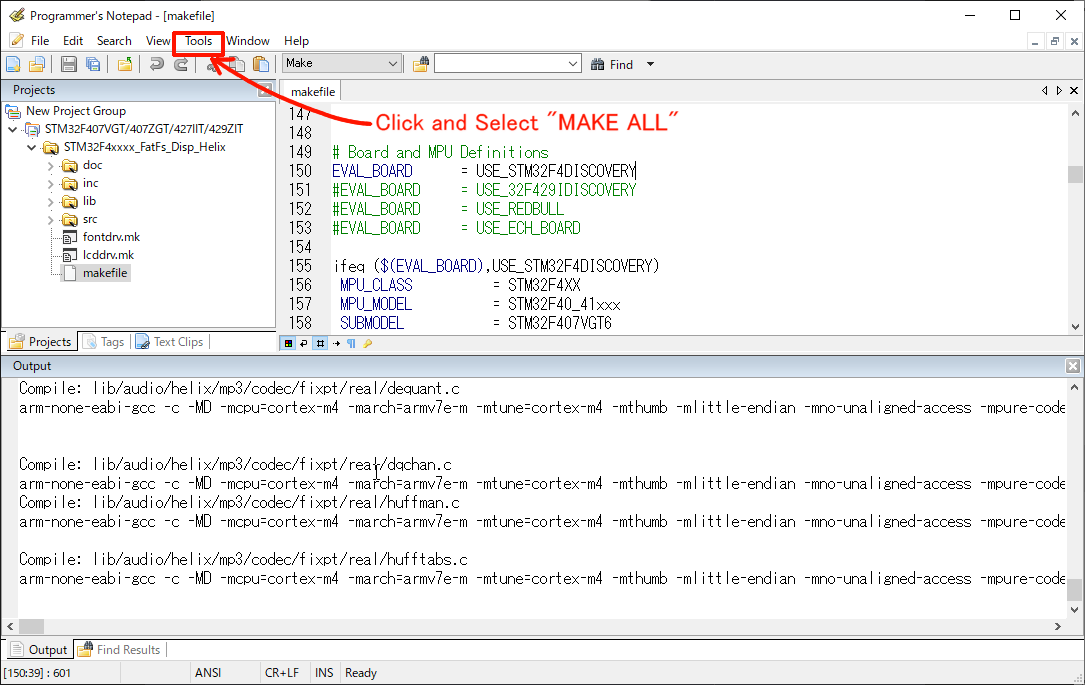
������PN2������
����PN2�ȡ��뤷���Ƥοͤϡ�make���ޥ�ɤ�PN2��"TOOL"����
�����ƤӽФ����Ȥ������褦�˰ʲ������Τ�make���ޥ�ɤ����"all"
�����Ĥ�����Ͽ���Ƥ���������
�������θ塢"build","clean"�ΰ����ˤĤ��Ƥ�Ʊ�ͤ���Ͽ���Ƥ���������
����
����
����
�������ס�Windows�Ķ��ѿ���PATH�����ꤹ��ɬ�פϤ���ޤ���
������������������ꤷ�Ƥ���ȥӥ�ɤ��̤�ʤ��ʤ뤳�Ȥ�����ΤǤ����դ���������
�������ӥ�ɳ���
����
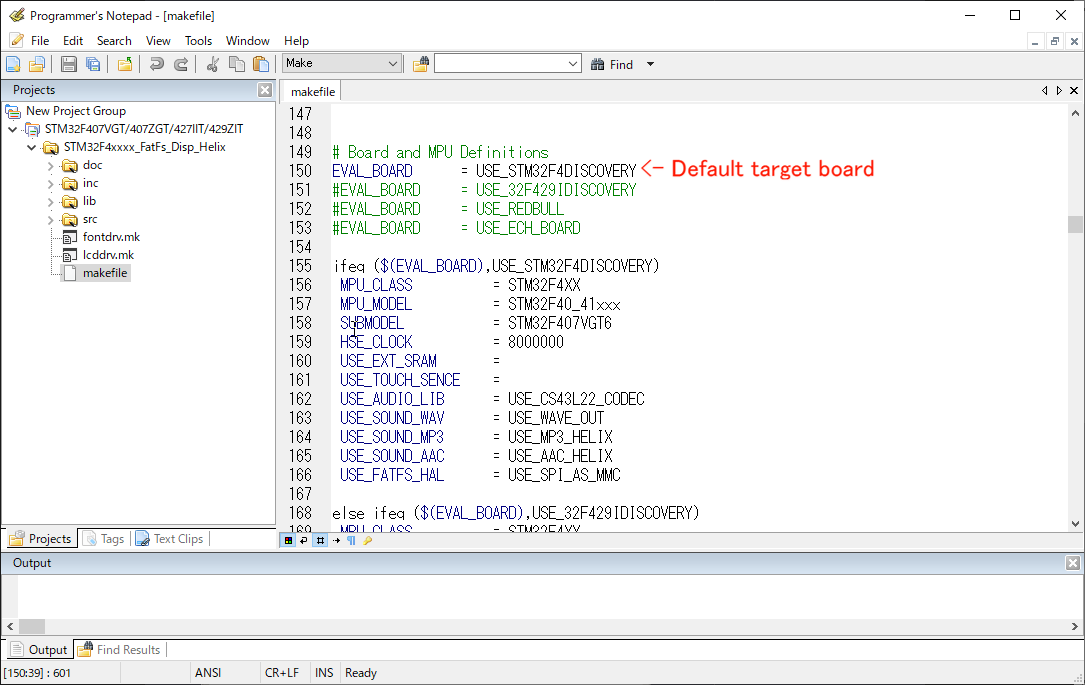
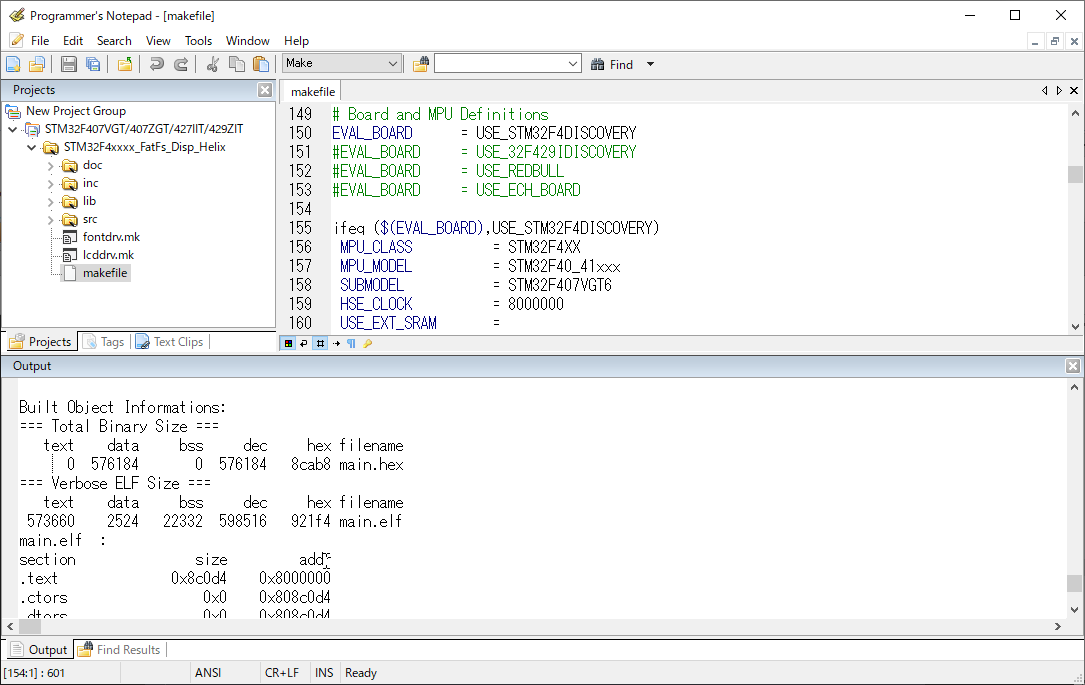
�����ǥե���ȤǤ�ɾ���ܡ��ɤ������STM32F4Discovery�����ˤʤäƤ��ޤ���
�����ޤ�����ɾ���ܡ���������γƥԥ����֤��Τꤿ������Ʊ����doc/Boards.txt��
�������Ȥ��Ƥ���������
�������꤬����ä���"Tool"����"make all"��ƤӽФ��ӥ�ɳ��ϤǤ���
����
�����ӥ�ɤ���λ�������������̤ʤɤξ��������˸���ޤ���
�����⤷����ѥ��륨�顼�ʤɤ�ȯ�����ӥ�ɤ��ߤޤä����ֿ��Ƕ�Ĵɽ�������Τ�
�������顼�ս��������ñ�Ǥ���
����
�����嵭�αվ�ɽ���ץ������ϥǥե��Dz����Υ饤�֥��/�ɥ饤�Ф�
����ͭ���ˤ��Ƥޤ���
��������-libjpeg
��������-libpng
��������-giflib
��������-FONTX2�ɥ饤��
��������-���켰/���������å��ѥͥ�ɥ饤��(����Υܡ��ɸ���)
��������-HelixMP3�ǥ�����(����Υܡ��ɸ���)
��������-HelixHE-AAC�ǥ�����(����Υܡ��ɸ���)
������ʬ�ۤɻ��֤�������ޤ���Warning���Фޤ����ӥ�ɻ������괭����
��������˥��������������"#warning"�ץ�ץ����å���������Ƥ�ս꤬
���������Ĥ�����ޤ��Τǵ��ˤ��ʤ��Ǥ���������
�������顼���Фƥӥ�ɤ��ߤޤä����ϳƼ������ľ���ޤ��礦���ؤɤξ�硢
����makefile���PATH���������äƤ��ޤ���
�������ʤߤ�"make all"�ϥ���ѥ��뤷�����֥������Ȥ������ä��Ƥޤä����
�������Ƥ���ӥ�ɡ�"make build"�Ϥ��Ǥ˥��֥��������Ǥ��줿�������ϥ��롼
�������ƥӥ��(�����������ɤ���������ƥ��å�&�ȥ饤�������Ȥ��˺�Ŭ)�Ǥ���
����"make clean"�Ϥ���̾�ΤȤ����������줿elf��hex�ե�����ޤ�ƥ�����֥�
�����ꥹ�ȥե�����䥪�֥������Ȥ�ޤ�äȾõ�Ƥ��ޤ��ޤ���
�����ϥ������å�CPU�ؤν���&�ǥХå��Ǥ�����������³���ޤ���
GPS����Ѥ���2
STM32Primer2����Ѥ���GPS�������Ǥ�������ä�Ĺ���ְ��ꤷ�ƥ�����
�Ԥ���Ȥ����ޤǻ��äƤ������Ȥ������褦�ˤʤ�ޤ�����
���֤ζ�Ũ�ϱ�������ª���Ƥ��Ƥ���������������ߤ��Ƥ��ޤ�
���ݤ������������Ȥǡ��ɤ���ʬ����������Ƥ��뤫�Ȥ����ڤ�ʬ����
���ʤ���֤��פ��ޤ������쳤������ƻ�Υ롼�ȤǸ�������λ�����->
��ƣ���Υ롼�Ȥ���ϤޤäƳ���->���ɤ��餤�ޤǤ����̤ʥե������
���줳������Υ��������Τ���˥���ǥ��ɲä�����Ƴ��������
����åפˤ䤵�����������ꤢ�줳���褦�䤯�Զ������ꤷ�ޤ�����
(���FatFs�ν����Υ��顼��������Ŭ�ڤʤ������ä�������)
�Ĥ��Ǥ˻ȤäƤ���GPS�⥸�塼���GM316+��������ƥʤ��齩��������
2��˥饤��ʥåפ˲ä�ä�CanMore����GT-723F���ѹ������ʤ��ʤ���
��̤����Ƥ��ޤ���
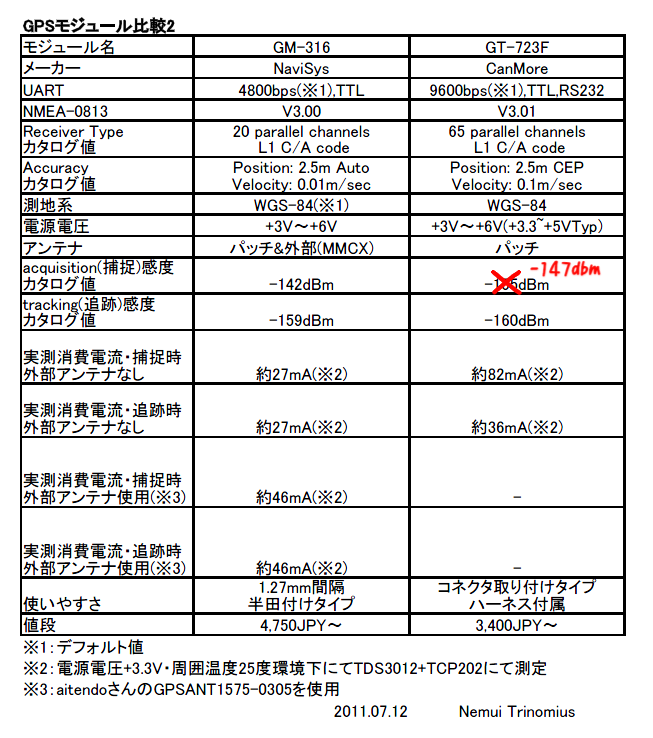
�����ɽ��äƤߤޤ�����
��GT-723F�ϱ����Ĥ���ǽ����acquisition(Ʊ����ª)���ʳ��Ǥ�
��80mA�ʾ���äƤ��ޤäƤ��ޤ���tracking(Ʊ������)���֤������32~36mA
������ޤ�����夭�����Ū����ǻȤ��ʤ����Ӥλ���Ū�ˤ�GM316+����
������ƥʤǻȤ�����ͭ���ʤΤ�ʬ����ޤ���������ͤλ��äƤ�GT-720F��
�����180mA���ϼ��������Ƥ��Τߤ�ȵ��Ѥäƿ��⤷�Ƥ����ʤ�������
���Ȥ��⤦���ȤҤȤ�����Ǥ���
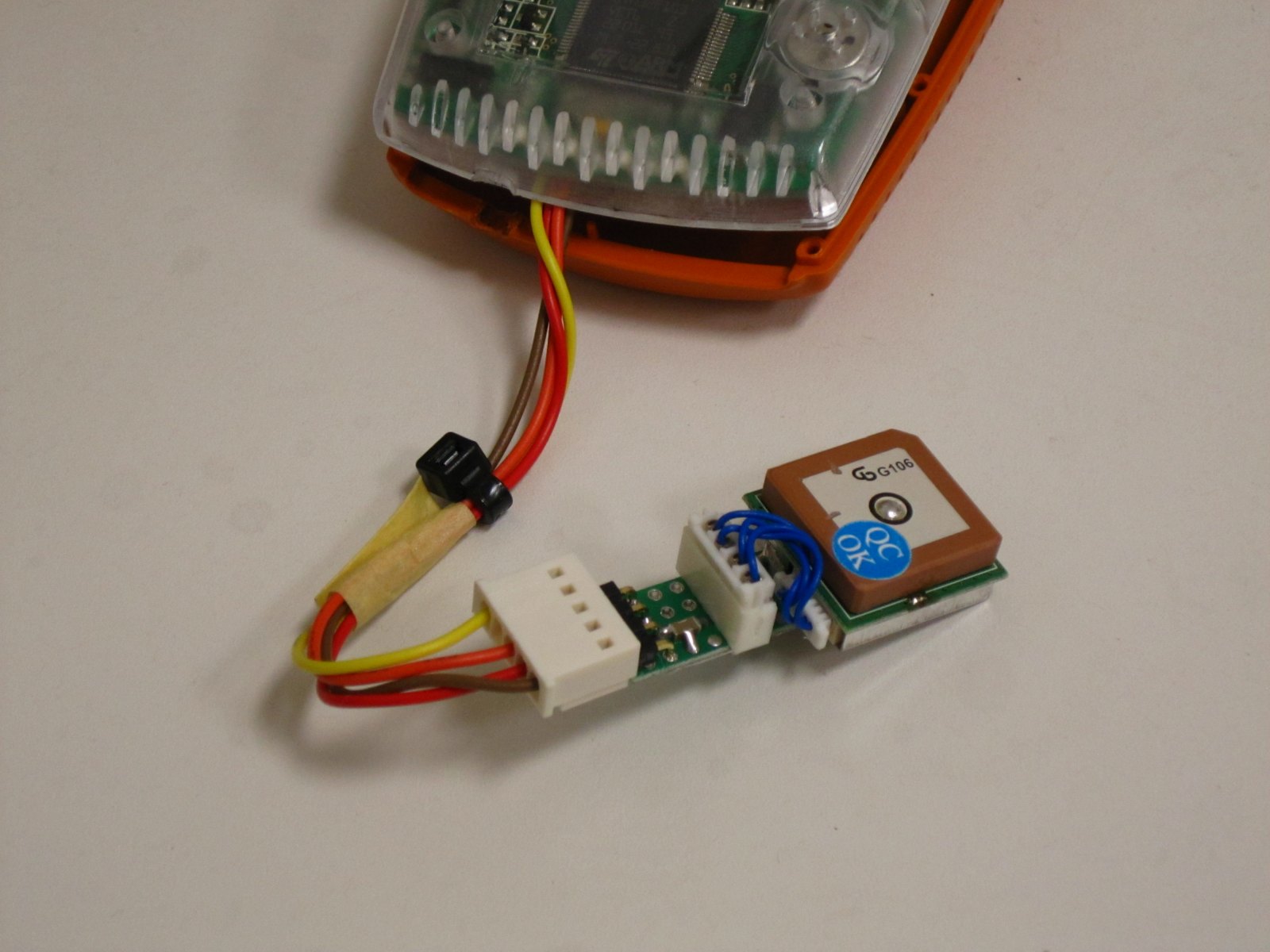
�����ߤα��ѷ��֡�STM32 Primer2����VCC,RxD(STM32 Prime2¦),GND��
�������Ф����ʤ�����GT-723F���̤˴��Ĥ��ߤ��Ƹ��ꤷ�Ƶ���Ū�ˤ�
����³�����Ƥޤ���
�ޤ������Υ⥸�塼���+3.0V������Ÿ����Ϥ��б����Ƥ��ޤ��Τǡ�
STM32Primer2����LCD�ΥХå��饤���Ÿ�����ѥ(3.1Vavg)���Ҽڤ���
���Ȥʤ�ޤ���

�����STM32Primer2�������ݤ��Ƥ�ͤ��Ȥ�����ͳ�������Ÿ�������¤���Ƥ�
�����Ȥɤ�Ƥʤ��ͤ�¿���Ǥ��礦����⤦�����ˤ���Ф����Ȼפ��ޤ���
(☝�ꤲ��굤̣)��

��JR���ֱؤˤơ�
���ͤत���������ʤΤǼºݤ˻Ȥ�����GPS�⥸�塼���Ƴ��������
������åפˤ���ߡ�����ˤ�������STM32Primer2���Τ�GPS�⥸�塼�뤴��
��������ʪ�����к����Ƥޤ���
�����ξ��֤Ǥ⥶�å��ˤ֤���������֤�ɹ�����δĶ��Ϥ�������Խ����
���Ǥ���ꤷ��ư����Τ����Ǥ�♥
�����դ����� ����Ϥʤ�
�ο�����ª���٤ʤ�Ǥ�����GT-723F�ϥѥå�����ƥʤΤߤǤ�����������
��Ǥ⤷�ä�������äƤ���Ƥ��ơ��դ˥ȥ�ͥ��ȥ����������Ȥ�
�����˼��Ǥ������ǤϰƳ���ñ�ˤѤäȼ������Ƥ����褦�Ǥ���
GM-316�ξ������Ȥ����ڤ�Ƥ���ª���֤���Υ�줺�Ǥ����ʾ���Ͽ
���Ƥ��ޤ����Ȥ��褯���ä��Τǻ���ι�ư�ε�Ͽ�˻Ȥ����ӤȤ��Ƥ�GT-723F��
�ۤ����ɤ����Ȥ��⤤�ޤ���
�����GT-723F��ä��Ȥ��˷�ɤĤ��Ǥ���äƤ��ޤä��ΤǤ��������ʤ�
���ݡ��ĥ����ɥᥤ������Ӥ�������ۤȤ�ɰ�����Ȥ�ʤ���̤ˤʤäƤޤ���

�������äƤ��ޤä�������Garmin�Ϲ⤤����������(�ߤ�������)

�����ݡ��ĥ����ɥᥤ�Ȥ��Ÿ��ܥ���Ĺ������OFF�ǤϤʤ����ץå����
��OFF�ȤʤäƤ��ޤ��߷פΤ��ᡢ���å���̵¤����������ǻ��������
���褦�ʹӤäݤ��Ȥ����Ͻ���ʤ��Τ������Ǥ�(��ž�֤˸��ꤷ�ƻȤ����Ȥ�
�����ꤵ��Ƥ���褦�Ǥ�)��
��PC�Ȥ���³����¢��USB-���ꥢ���Ѵ���USB��ͳ�ǥǡ������ɤ߽ޤ���
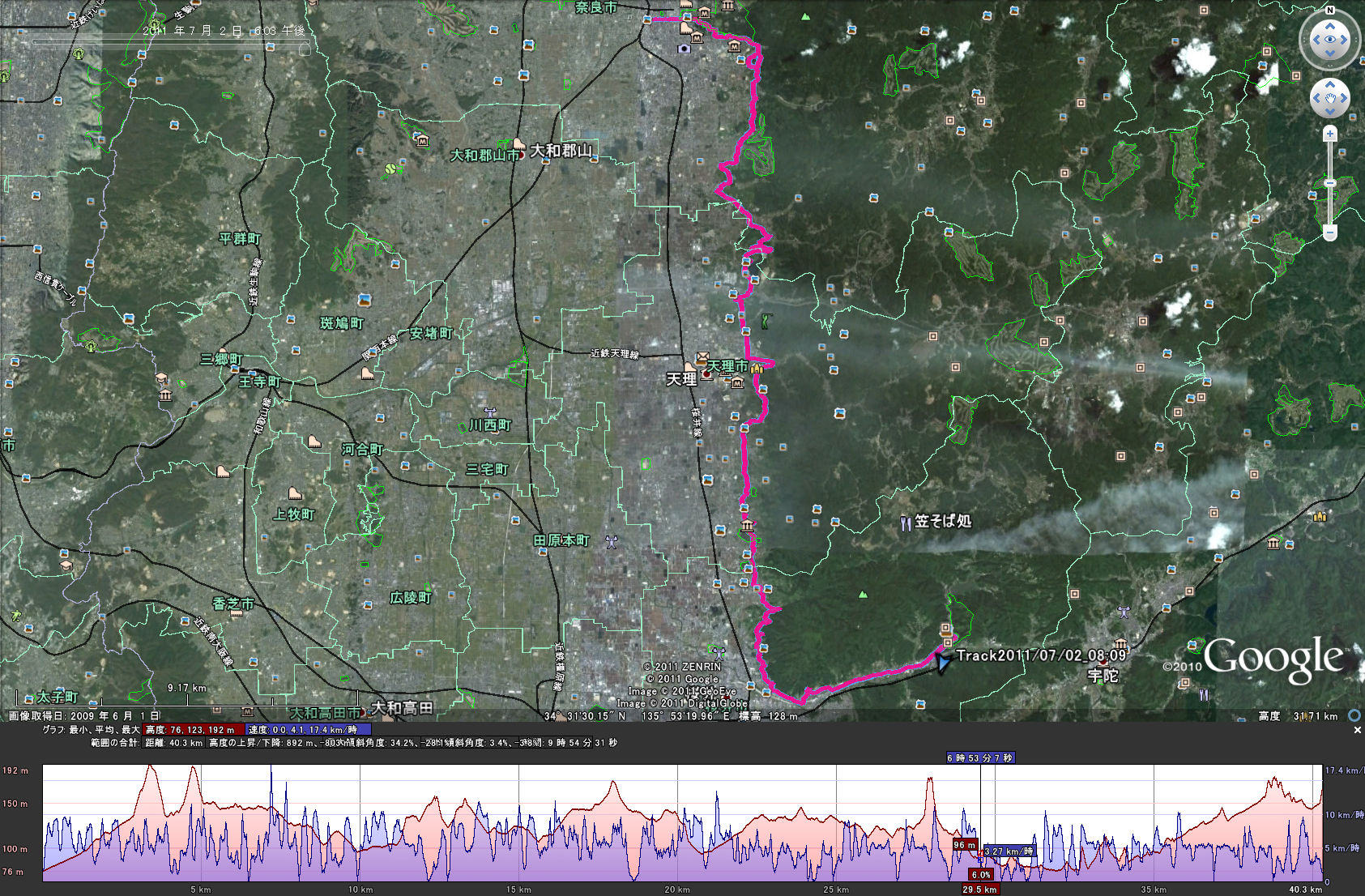
�������JR���ɱؤ����ŴĹë���ޤǤΥ롼�Ȥ�Ʊ���˵�Ͽ������ΤǤ���
���ۤȤ�ɤԤä���Ťʤä���äƤ��Ǥ������֤Υ饤���ݡ���
�������ɥᥤ�Ȥ��Ĥ������GPS�������Ǥ���
����ž�ݤˤʤäƤ��ޤäƤ��ޤ�������������˰��������餫����ͳ��
��ߤ��Ƥ⺤��ʤ��褦�˸��ߤ�ξ�����äƻ��˹ԤäƤޤ���
����������ž�ݤǤ����⤦�����Ǥ�(�ꤲ��굤̣��)��
���ޤ�
��Τ֤��������pv������Ū�˾��ʤ����Ĥޤ�͵���̵���Τ��쳤������ƻ
��Ϣ�ε����ʤΤǤ����������������˥֥饦���Υ٥���ޡ����Ȥ��ƻȤ���
����Τ��ΤäƤޤ���������ˤ��äƤ��뤫�ʤȻפդ��ȤҤȤ�����Ǥ�����
����Ϥ����Ȥ��ƻ��˶�̣���ʤ������ɥ�դ�����Ū��ʪ�Ȼפä�
�������Ƥ���������ƨ�����ޤ����(�殺�ʥ�����ߤ����ʴ��)
�쳤������ƻ�λ����ե롼�Ȥ���ƻ�ǤϤʤ��ΤǤ֤����ˤϽʤ��Ĥ��
�Ǥ���������������̤˥����������Ȥ���������
���л�->����

���Υ롼�Ȥ�99%����ϩ�Ǥ�����

������������ʿ����˱��Ʋ��

�����������(������+����������)
������->����

��äѤ�����ϩ��

����(�Ȥ��������줷���ʤ�����)����������

���бؤ��Τ��餢���Ҹˡ�
(�����Ϥ��ޤäƤ��ΤǸ���������бؤޤ����äƵ���ޤ���)
������->����

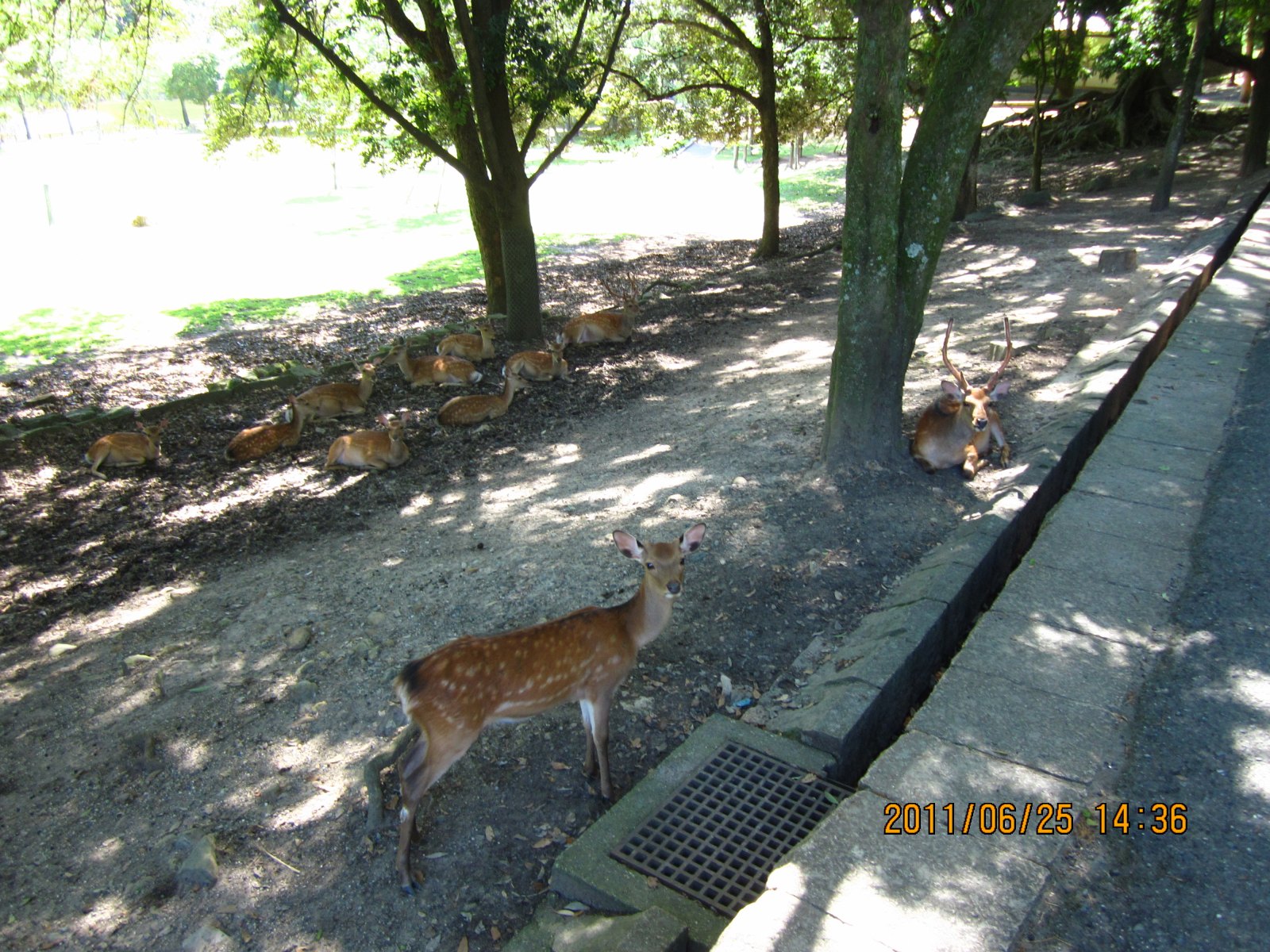
Ƹ��˼����

�ʤ�����

�⻳���ࡣ���������褬Ĺ����

�����������ֶ�ˡ���

������������JR���ֱؤˤ����ɤ�ʬ����ʤ�����
������->����

������Ϸ���ߡ�

������

���Ȥ����Ϥ��뵨��ˤʤäƤ��ޤ�����������

ƽ���㲰��
����
������->Ĺë��

����

���֤䤵�����롼�ȤǤ����ƾ������
�դ˰��ֲ��ʥ롼�Ȥˡ�����

�о���ܡ�

��������Τ����Ÿ˾��

������ҤΥϥ��ƥ�����嶡�����֡�

Ĺë������

Ĺë���ؤ����ͼ��졣
���줫������֤Ǥ����ƾ�η㤷����ư��Ǯ��ɤ�æ��ɾ��Ȥ���ľ���˻������
���ι⤤�ꥹ��������դ��ޤȤ��ޤ����ͤत�������Ф����Ƥ��������ʤ��Τ�
ŵ��UV���åȤΥ������ߤ����ʴ���Ǵ��������ɤ��Ƥ뤪�����Ǿ嵭�Υꥹ����
����˹�ޤ�Τǰ�����ä��к���Фä��ꤷ�Ƥ�(�Ĥ��)�Ǥ���
��ĥ�餺�������Υ��30km������ޤ���ī���ȯ�����٤��Ȥ�15���ޤǤˤ�����
�����Ƶ���Ȥ����Τ�����褦�ˤ��Ƥޤ���
���Ȥ��ä����ν�������Τ���Ϥ���ˤ��ä���ӡ�����ޤʤ��褦�ˣ���
�ӡ���ˤϾ��Ƥʤ��ä�����̎ߎʎ�♥
![]()



���ա�Ϣ����Ϣ��Υ��
��SNS���äƤޤ���

 powered by �ޤ�虜
powered by �ޤ�虜
- ARM/STM32 (119)
- OpenOCD (27)
- ARM/NxP (34)
- ARM/Cypress (5)
- ARM/Others (3)
- ARM/Raspi (1)
- AVR (13)
- FPGA (4)
- GPS/GNSS (20)
- MISC (86)
- SDCard_Rumors (1)
- STM8 (2)
- Wireless�ʥ��� (16)
- ������ (1)
- �֥饦���٥���ޡ��� (29)
- ���ܤμ�����ƻ (27)

- GNSS�⥸�塼�����Ѥ���21 -SAM-M10Q�����줿��!?�Ȼפä���ľ����(���ޤ�����)-
�� Kenji Arai (05/29) - GNSS�⥸�塼�����Ѥ���21 -SAM-M10Q�����줿��!?�Ȼפä���ľ����(���ޤ�����)-
�� �ͤत (05/26) - GNSS�⥸�塼�����Ѥ���21 -SAM-M10Q�����줿��!?�Ȼפä���ľ����(���ޤ�����)-
�� Kenji Arai (05/24) - ������Φ������ƻ����� -����ʿ��θ�����ȴ���롪-
�� �ͤत (12/18) - ������Φ������ƻ����� -����ʿ��θ�����ȴ���롪-
�� �Ҥ��� (12/15) - STM32U0�Ϥ¤�ޤ���
�� �ͤत (08/07) - STM32U0�Ϥ¤�ޤ���
�� �Ҥ��� (07/28) - STM32H5��ȤäƤߤ�3 -�Ԥ�������鸫������櫤���-
�� �ͤत (05/17) - STM32H5��ȤäƤߤ�3 -�Ԥ�������鸫������櫤���-
�� �ɤ����� (05/16) - STM32H5��ȤäƤߤ�3 -�Ԥ�������鸫������櫤���-
�� �ɤ����� (05/16)

- October 2025 (1)
- September 2025 (1)
- August 2025 (1)
- July 2025 (1)
- June 2025 (1)
- May 2025 (1)
- April 2025 (1)
- March 2025 (1)
- February 2025 (1)
- January 2025 (1)
- December 2024 (2)
- November 2024 (1)
- October 2024 (1)
- September 2024 (1)
- August 2024 (1)
- July 2024 (1)
- June 2024 (1)
- May 2024 (1)
- April 2024 (1)
- March 2024 (1)
- February 2024 (2)
- January 2024 (1)
- December 2023 (4)
- November 2023 (2)
- October 2023 (2)
- September 2023 (1)
- August 2023 (2)
- July 2023 (1)
- June 2023 (2)
- May 2023 (3)
- April 2023 (1)
- March 2023 (1)
- February 2023 (1)
- January 2023 (1)
- December 2022 (2)
- November 2022 (1)
- October 2022 (1)
- September 2022 (1)
- August 2022 (1)
- July 2022 (1)
- June 2022 (1)
- May 2022 (1)
- April 2022 (1)
- March 2022 (1)
- February 2022 (1)
- January 2022 (1)
- December 2021 (2)
- November 2021 (2)
- October 2021 (1)
- September 2021 (1)
- August 2021 (1)
- July 2021 (1)
- June 2021 (1)
- May 2021 (1)
- April 2021 (1)
- March 2021 (1)
- February 2021 (1)
- January 2021 (1)
- December 2020 (3)
- November 2020 (1)
- October 2020 (1)
- September 2020 (1)
- August 2020 (1)
- July 2020 (1)
- June 2020 (2)
- May 2020 (1)
- April 2020 (1)
- March 2020 (1)
- February 2020 (1)
- January 2020 (1)
- December 2019 (3)
- November 2019 (1)
- October 2019 (1)
- September 2019 (2)
- August 2019 (1)
- July 2019 (1)
- June 2019 (1)
- May 2019 (1)
- April 2019 (1)
- March 2019 (1)
- February 2019 (1)
- January 2019 (1)
- December 2018 (3)
- November 2018 (2)
- October 2018 (1)
- September 2018 (1)
- August 2018 (1)
- July 2018 (1)
- June 2018 (1)
- May 2018 (1)
- April 2018 (2)
- March 2018 (1)
- February 2018 (1)
- January 2018 (1)
- December 2017 (2)
- November 2017 (2)
- October 2017 (1)
- September 2017 (1)
- August 2017 (1)
- July 2017 (1)
- June 2017 (1)
- May 2017 (1)
- April 2017 (1)
- March 2017 (2)
- February 2017 (2)
- January 2017 (2)
- December 2016 (7)
- November 2016 (2)
- October 2016 (2)
- September 2016 (1)
- August 2016 (1)
- July 2016 (1)
- June 2016 (1)
- May 2016 (2)
- April 2016 (1)
- March 2016 (2)
- February 2016 (1)
- January 2016 (1)
- December 2015 (3)
- November 2015 (1)
- October 2015 (3)
- September 2015 (2)
- August 2015 (2)
- July 2015 (3)
- June 2015 (3)
- May 2015 (4)
- April 2015 (2)
- March 2015 (4)
- February 2015 (1)
- January 2015 (3)
- December 2014 (3)
- November 2014 (2)
- October 2014 (1)
- September 2014 (2)
- August 2014 (2)
- July 2014 (3)
- June 2014 (2)
- May 2014 (1)
- April 2014 (1)
- March 2014 (4)
- February 2014 (4)
- January 2014 (3)
- December 2013 (5)
- November 2013 (4)
- October 2013 (3)
- September 2013 (2)
- August 2013 (2)
- July 2013 (2)
- June 2013 (3)
- May 2013 (2)
- April 2013 (2)
- March 2013 (2)
- February 2013 (2)
- January 2013 (3)
- December 2012 (4)
- November 2012 (2)
- October 2012 (2)
- September 2012 (4)
- August 2012 (1)
- July 2012 (3)
- June 2012 (2)
- May 2012 (3)
- April 2012 (3)
- March 2012 (2)
- February 2012 (3)
- January 2012 (3)
- December 2011 (5)
- November 2011 (3)
- October 2011 (2)
- September 2011 (2)
- August 2011 (2)
- July 2011 (2)
- June 2011 (2)
- May 2011 (2)
- April 2011 (2)
- March 2011 (2)
- February 2011 (2)
- January 2011 (3)
- December 2010 (7)
- November 2010 (1)
- October 2010 (1)
- September 2010 (1)
- August 2010 (3)
- July 2010 (4)
- May 2010 (1)
- April 2010 (2)
- March 2010 (2)
- February 2010 (2)
- January 2010 (3)
- December 2009 (3)
- November 2009 (8)
- October 2009 (7)
- September 2009 (5)
- August 2009 (4)
- July 2009 (6)
- June 2009 (6)
- May 2009 (14)
- January 1970 (1)


Copyright(C) B-Blog project All rights reserved.