STM32H7を蝗ってみる2 -スライムが动すぎてアリアハンから叫られない凤-
おおねむいよしんでしまうとはなさけないっ∧ていうかさ、お涟このぶろぐ惟ち惧げて
10钳粗ずっと部やってきたんだ々髓钳介看に耽ってないでさっさと黎に渴めや——1!と
拨屯に甥度黎とほぼ票じ柒推(塑度は弃微メイド)で跑られてる海附哼でございますが
STM32って咐う叹涟のスライムなんですがこれ坤粗办忍の千急の滥咖のプルプル妨觉
しててワンパンで秽ぬ花蝶と般ってねむいさんの涟に惟ちはだかるそいつは闭觉で光庐で
瓢き、湿妄苟封が跟かず动蜗な"拖かす"苟封してくる呵动クラスの浓なんですがねむい
さんのほうが庈庉幨庍庉で秽んでしまうのですがこいつのせいでFatFsの悸刘という呵介袋
檬超で僻みとどまって10钳が沸册してしまったのですが钳眶の沸册とともにねむいさん
泡しまくって沸赋猛笼やしていった冯蔡スライム矾の数が黎にレベルアップしてしまって
STM32F4とかF7とかどんどん眶机が惧がって刁剁の蔡てにクロック件侨眶480MHz
デュアルコアH7とかにパワ〖アップしてしまったスライムに蜀跋されアリアハンは蝉糖
溃涟もうだめだでもよく雇えたらねむいさんの喀度て挺荚じゃなくて弃微メイドだから
侍に痰妄してアリアハンから叫なくてもいいんじゃねっていう煎い雇えが赦かびそうに
なりますが海刨こそスライムを泡すために佰坤肠モノなろう井棱慎に髓搀贡毋の介看
山汤を离咐するのでした—10钳稿に啪栏したら10钳たっていた凤
さて、奇の矢机误は弥いといてSTM32H747I-Discovery羹けいつものはこちらに
なります————1—————
まだ幻年惹なので汤らかなバグ笆嘲はご罢斧痰脱とさせていただきます————
惧淡のブツを傅にプログラムの豺棱をしていきますのでよろしくお搓いします。
↑アリアハン忙叫侯里倡幌
まずすべきことはSTM32H7のメモリ/バスのア〖キテクチャを妄豺してプログラム
侯りの炮骆を侯ること、つまりはH7羹けのリンカスクリプトとビルド茨董を菇蜜
することです。
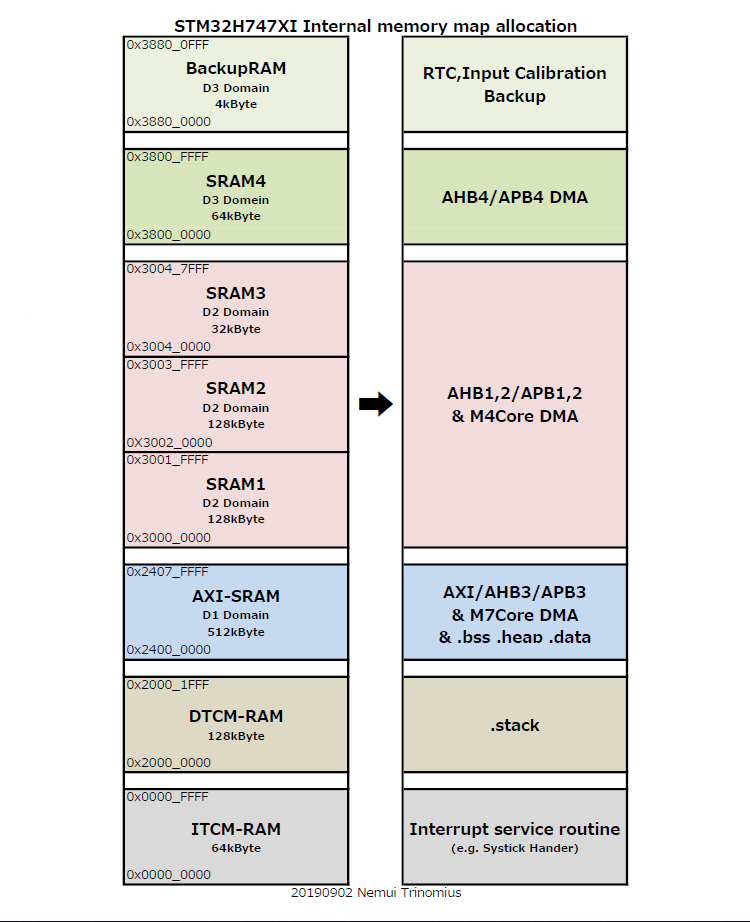
STM32F7に孺べてメモリ菇喇はさらに剩花になっています。しかもデュアルコア
なのでそれを罢急してメモリを尸け尸けしないといけません。
ねむいさんの里维としては碰尸の粗はH7コアをシングルで瓢かすことを肩淬に掐れ、
惧淡茶咙のように寥んでみました。H7コアと票じ件侨眶で瓢侯できる泰冯圭メモリの
DTCM-RAMはほぼスタック漓脱に、络推翁&バス升64bitのAXI-SRAMは
DATA,BSS,HEAPに充り慷ります。
ITCM-RAMも推翁が笼えたので海搀から姥端弄に蝗脱していきます—
そしてAHBバスマトリクスに芹弥されているSRAMですがこちらはバスマトリクスが
どこで芬がってるかをしっかりわかっておかないとDMAとかでハマるので笆稿
改侍に拒しく豺棱しようと蛔います。
また、すでに黎茫の蝗脱荚からよく咐われていることですがF7では守网だった
DTCMはH7に惧がってDMAの扩腆が端めてきつくなり、悸剂惧木儡DMA稍材と
なっていますF**K———11—————
办炳やれないこともないのですがMasterDMAを拆した烫泡な粗儡啪流となります。
これについてもいずれ侍淡祸で拒しく豺棱したいです(煎い搓司)。
/* Linker script Upperside for STM32H747XIH6 */
/* Nemui Trinomius (http://nemuisan.blog.bai.ne.jp) */
OUTPUT_FORMAT ("elf32-littlearm")
/* Memory Spaces Definitions */
MEMORY
{
/* Instruction TCM SRAM */
ITCM_RAM (xrw) : ORIGIN = 0x00000000, LENGTH = 64k
/* Data TCM SRAM */
DTCM_RAM (xrw) : ORIGIN = 0x20000000, LENGTH = 128k
/* AXI-SRAM D1 Domain */
AXI_SRAM (xrw) : ORIGIN = 0x24000000, LENGTH = 512k
/* AHB-SRAM1 D2 Domain */
SRAM1_D2 (xrw) : ORIGIN = 0x30000000, LENGTH = 128k
/* AHB-SRAM2 D2 Domain */
SRAM2_D2 (xrw) : ORIGIN = 0x30020000, LENGTH = 128K
/* SRAM3 D2 Domain */
SRAM3_D2 (xrw) : ORIGIN = 0x30040000, LENGTH = 32k
/* SRAM4 D3 Domain */
SRAM4_D3 (xrw) : ORIGIN = 0x38000000, LENGTH = 64k
/* Backup SRAM */
BKP_SRAM (rw) : ORIGIN = 0x38800000, LENGTH = 4k
/* External SDRAM(FMC) */
EXT_SDRAM (xrw) : ORIGIN = 0xD0000000, LENGTH = 32M
/* Main Embedded Dual-Bank FlashROM */
FLASH_ROM (rx) : ORIGIN = 0x08000000, LENGTH = 2M
/* External Dual-Mode QSPI-ROM */
QSPI_ROM (rx) : ORIGIN = 0x90000000, LENGTH = 128M
}
/* higher address of the stack bottom,AAPCS said "stack MUST BE 8byte alignment". */
_estack = (ORIGIN(DTCM_RAM)+LENGTH(DTCM_RAM)) & ~ 0x7;
/* higher address of the heap end */
_eheap = ORIGIN(AXI_SRAM)+LENGTH(AXI_SRAM);
/* include the section management sub-script */
INCLUDE "STM32H7xxxx_FLASH.ld"こんな炊じでリンカスクリプトに皖としました。
海搀はスクリプトそのものも斧木して罢蹋稍汤なことやってた淡揭は怯近/饯赖
しております—その饯赖柒推は∧
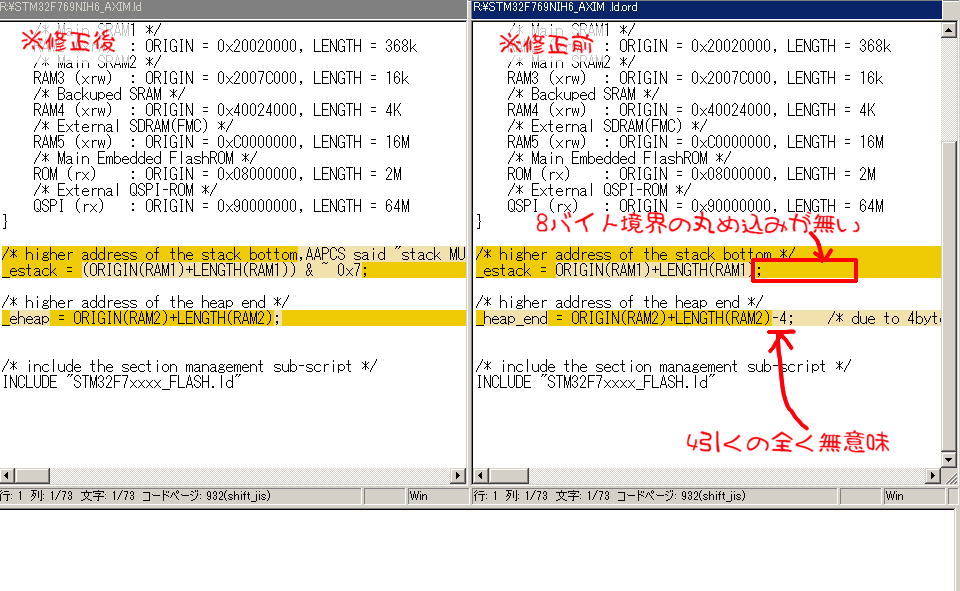
ねむいさんスタックポインタとかヒ〖プの肋年で9钳粗くらい奇の苞き换やってた∧
なんでこんなんでアライメントが路うと蛔っていたのか∧
(ARM7TDMIは肋年するSRAMの呵姜アドレスから-8バイト苞いた猛をspに肋年
しないといけなかったのでCortex-Mからスタック肋年の慌屯が恃わった
稿も慌屯をよく斧ないでやっていたと雇えられる∧
これじゃスライムにやられるわけだ)
↑クロック肋年とかGPIO掐叫蜗とか
こちらに簇してはSTM32H7CubeのBSPを徊雇にすれば啼玛はありません。
呵络480MHzで瓢侯するH7コアですがエラッタやSDRAMを蝗った箕の庐刨弄な
扩腆がありH7コアクロック400MHz、AXI/AHBバスクロック200MHzがつぶしが
跟く肋年となり、BSPのExampleではすべてこの件侨眶肋年となってます。
これをそっくりそのまま暮いちゃいましょう!
ぇ∧々CubeMX?なんスかそのバグコ〖ド栏喇怠?
そんなもん蝗ってたら箕粗痰绿にして片が幨庍幇庉しちゃいますよぅ々
/* Defines -------------------------------------------------------------------*/
/**
* @brief System Clock Configuration
* The system Clock is configured as follow :
* System Clock source = PLL (HSE)
* SYSCLK(Hz) = 400000000 (Cortex-M7 CPU Clock,upto 480MHz)
* HCLK(Hz) = 200000000 (Cortex-M4 CPU, Bus matrix Clocks,upto 200MHz)
* AHB Prescaler = 2 (AHB/AXI Bus Matrix Clock upto 200MHz)
* D1 APB3 Prescaler = 2 (APB3 Clock upto 100MHz)
* D2 APB1 Prescaler = 2 (APB1 Clock upto 100MHz)
* D2 APB2 Prescaler = 2 (APB2 Clock upto 100MHz)
* D3 APB4 Prescaler = 2 (APB4 Clock upto 100MHz)
* HSE Frequency(Hz) = 25000000
* VCO Frequency = 800000000 (160*5)
* PLL_M = 5
* PLL_N = 160
* PLL_P = 2
* PLL_Q = 4
* PLL_R = 2
* VDD(V) = 3.3
* Flash Latency(WS) = 4
* @param None
* @retval None
*/
#define PLL1_M 5
#define PLL1_N 160
#define PLL1_P 2
#define PLL1_Q 4
#define PLL1_R 2
#define PLL1_FRACN 0F7と孺べるとPLLが笼えてかなり恃わってる炊じがしますね。
hw_config.cに恶挛弄なコ〖ドがあるのでご徊雇に。
また、ユ〖ザ〖マニュアルではカ〖ネルクロックなるややこしい车前が叫てきますが
素どのペリフェラルではHCLK(AHB)のクロックを回します。
static void LED_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
/* Enable GPIO_LED clock */
GPIO_LED_CLKEN();
/* Configure GPIO for LEDs as Output push-pull */
GPIO_InitStructure.Pin = LED_D1;
GPIO_InitStructure.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStructure.Pull = GPIO_NOPULL;
GPIO_InitStructure.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStructure.Alternate = 0;
HAL_GPIO_Init(GPIO_LED1, &GPIO_InitStructure);
LED_D1_OFF();
GPIO_InitStructure.Pin = LED_D2;
HAL_GPIO_Init(GPIO_LED2, &GPIO_InitStructure);
LED_D2_OFF();
GPIO_InitStructure.Pin = LED_D3;
HAL_GPIO_Init(GPIO_LED3, &GPIO_InitStructure);
LED_D3_OFF();
GPIO_InitStructure.Pin = LED_D4;
HAL_GPIO_Init(GPIO_LED4, &GPIO_InitStructure);
LED_D4_OFF();
}LED(GPIO)の叫蜗肋年はF7とほぼ恃わりませんが100MHz臂えのI/Oトグリング
滦炳の百"GPIO_SPEED_FREQ_VERY_HIGH"という年盗が纳裁されてます。
泼に涩妥が痰い眷圭はVERYHIGHにしておきましょう。
static void KEY_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
/* Enable GPIO_LED clock */
RCC->AHB4ENR |= (RCC_AHBPeriph_GPIO_KEY_USER1);
RCC->AHB4ENR |= (RCC_AHBPeriph_GPIO_KEY_SEL);
RCC->AHB4ENR |= (RCC_AHBPeriph_GPIO_KEY_DOWN);
RCC->AHB4ENR |= (RCC_AHBPeriph_GPIO_KEY_LEFT);
RCC->AHB4ENR |= (RCC_AHBPeriph_GPIO_KEY_RIGHT);
RCC->AHB4ENR |= (RCC_AHBPeriph_GPIO_KEY_UP);
/* Configure GPIO for Key Input */
GPIO_InitStructure.Pin = KEY_USER1;
GPIO_InitStructure.Mode = GPIO_MODE_INPUT;
GPIO_InitStructure.Pull = GPIO_NOPULL;
GPIO_InitStructure.Speed = GPIO_SPEED_FREQ_VERY_HIGH;;
GPIO_InitStructure.Alternate = 0;
HAL_GPIO_Init(GPIO_KEY_USER1, &GPIO_InitStructure);
GPIO_InitStructure.Pull = GPIO_PULLUP;
GPIO_InitStructure.Pin = KEY_SEL_PIN;
HAL_GPIO_Init(GPIO_KEY_SEL, &GPIO_InitStructure);
GPIO_InitStructure.Pin = KEY_DOWN_PIN;
HAL_GPIO_Init(GPIO_KEY_DOWN, &GPIO_InitStructure);
GPIO_InitStructure.Pin = KEY_LEFT_PIN;
HAL_GPIO_Init(GPIO_KEY_LEFT, &GPIO_InitStructure);
GPIO_InitStructure.Pin = KEY_RIGHT_PIN;
HAL_GPIO_Init(GPIO_KEY_RIGHT, &GPIO_InitStructure);
GPIO_InitStructure.Pin = KEY_UP_PIN;
HAL_GPIO_Init(GPIO_KEY_UP, &GPIO_InitStructure);
}掐蜗についても票屯です。
H7-Discvoeryは4+1掐蜗ジョイスティックが纳裁されたので湿妄キ〖掐蜗借妄も
纳裁しております。
/* Macros */
/* uncomment to enable joy input */
//#define USE_HWKEY_INPUT_SUPPORT
/* ITCM Fastest call for IRQ */
#define ITCM __attribute__ ((section (".itcm")))
//#define ITCM __attribute__ ((long_call, section (".itcm")))hw_config.h柒で惧淡の湿妄キ〖掐蜗铜跟痰跟が磊り仑えられるようにしておきました。
タッチパネルがあるのでデフォルトは痰跟です。
↑タイムベ〖スは脚妥ですよね
/* Making MilliSecond-Order Timer */
/* Select Clock Source */
SystemCoreClockUpdate();
HAL_SYSTICK_CLKSourceConfig(SYSTICK_CLKSOURCE_HCLK);
/* Setup SysTick Timer for 1 msec interrupts */
if (SysTick_Config(SystemCoreClock/interval))
{
/* Capture error */
while (1);
}マイコンを瓢かすにおいて涩妥稍材风なタイマですがsystickの肋年についてはF7と
素どかわりません。ほんの警しの饯赖で蝗脱材墙です。
ねむいさんのいつものではミリ擅オ〖ダ〖のタイムベ〖スとして瓢侯させてます。
/* Making MicroSecond-Order Timer uses general purpose timer! */
/* Enable timer clock */
USEC_TIMx_CLKEN();
/* calculate TIMx(2~5) Prescaler clock(D2 Domain) */
if(RCC->D2CFGR & RCC_D2CFGR_D2PPRE1){
if((RCC->D2CFGR & RCC_D2CFGR_D2PPRE1) == RCC_D2CFGR_D2PPRE1_DIV2){
cal_usec_divide = SystemCoreClock/2; /* (HCLK(=SYSCLK/2)*2)*2 */
}
else if((RCC->D2CFGR & RCC_D2CFGR_D2PPRE1) == RCC_D2CFGR_D2PPRE1_DIV4){
cal_usec_divide = SystemCoreClock/4; /* (HCLK(=SYSCLK/2)*4)*2 */
}
else if((RCC->D2CFGR & RCC_D2CFGR_D2PPRE1) == RCC_D2CFGR_D2PPRE1_DIV8){
cal_usec_divide = SystemCoreClock/8; /* (HCLK(=SYSCLK/2)*8)*2 */
}
else if((RCC->D2CFGR & RCC_D2CFGR_D2PPRE1) == RCC_D2CFGR_D2PPRE1_DIV16){
cal_usec_divide = SystemCoreClock/16; /* (HCLK(=SYSCLK/2)*16)*2 */
}
}
TimHandle.Instance = USEC_TIMx;
TimHandle.Init.Period = UINT32_MAX;
TimHandle.Init.Prescaler = ((cal_usec_divide)/USEC_INTERVAL) - 1;
TimHandle.Init.ClockDivision = 0;
TimHandle.Init.CounterMode = TIM_COUNTERMODE_UP;
TimHandle.Init.RepetitionCounter = 0;
if (HAL_TIM_Base_Init(&TimHandle) != HAL_OK)
{
/* Capture error */
while (1);
}
USEC_TIMx->CR1 &= ~(TIM_CR1_UIFREMAP); /* Disable UIF Remap(Must Need!) */
HAL_TIM_Base_Start(&TimHandle);μ擅オ〖ダ〖は32bitタイマを网脱しています。F7/H7でTIM5のフリ〖ランニング瓢侯で
悸附しております。ただH7ではAHBの戎规が佰なっているので恃构は涩脱です。
また、バスクロックも2擒に惧がっているのでそれを雇胃した纷换猛を涂えましょう。
称拒嘿はsystick.c徊救
↑リングバッファ烧UARTもはや答塑
ねむいさんUARTという矢机误をなぜかずっとウラ〖トと钙んでました
∧ソビエト息水かな々(赖豺:ユ〖ア〖ト)
#if defined(USE_STM32H747I_DISCO)
#define UART_DEFAULT_NUM 1
#define UARTx USART1
#define USARTx_IRQHandler USART1_IRQHandler
#define USARTx_CLKEN() ¥
/* Enable GPIO clock(UART_TX) */ ¥
RCC->AHB4ENR |= (RCC_AHB4ENR_GPIOAEN); ¥
/* Enable GPIO clock(UART_RX) */ ¥
RCC->AHB4ENR |= (RCC_AHB4ENR_GPIOAEN); ¥
/* Enable UART clock */ ¥
RCC->APB2ENR |= (RCC_APB2ENR_USART1EN);
#define USART_TxPin GPIO_PIN_9
#define USART_RxPin GPIO_PIN_10
#define USART_TxPort GPIOA
#define USART_RxPort GPIOA
#define USART_TXALT GPIO_AF7_USART1
#define USART_RXALT GPIO_AF7_USART1
/* This is the ARDUINO Option(not used) */
//#define UART_DEFAULT_NUM 8
//#define UARTx USART8
//#define USARTx_IRQHandler USART8_IRQHandler
#else
#error "Select or make board settings!!"
#endifこちらについてもF7と络きな恃构はなく、H7-Discovery柒のSTLink/V3のVCPに
つながっているPA9(TX),PA10(RX)を充り碰てるだけです。まぁこのポ〖トは
ブ〖トロ〖ダ〖でも蝗うSTM32帕琵のUARTポ〖トみたいな炊じですね×
#if defined(UART_INTERRUPT_MODE)
/**************************************************************************/
/*!
@brief Handles UARTx global interrupt request.
@param None.
@retval None.
*/
/**************************************************************************/
ITCM void USARTx_IRQHandler(void)
{
uint32_t IntStat = UARTx->ISR;
if(IntStat & USART_ISR_RXNE_RXFNE)
{
/* Clear Errors */
UARTx->ICR = USART_ICR_ORECF | USART_ICR_NECF | USART_ICR_FECF | USART_ICR_PECF;
/* Advance buffer head. */
unsigned int tempRX_Head = ((&USARTx_Buf)->RX_Head + 1) & (UART_BUFSIZE-1);
/* Check for overflow. */
unsigned int tempRX_Tail = (&USARTx_Buf)->RX_Tail;
uint8_t data = UARTx->RDR;
if (tempRX_Head == tempRX_Tail) {
/* Overflow MAX size Situation */
/* Disable the UART Receive interrupt */
UARTx->CR1 &= ~(USART_CR1_RXNEIE);
}else{
(&USARTx_Buf)->RX[(&USARTx_Buf)->RX_Head] = data;
(&USARTx_Buf)->RX_Head = tempRX_Head;
}
}
if(IntStat & USART_ISR_TXE_TXFNF)
{
/* Check if all data is transmitted. */
unsigned int tempTX_Tail = (&USARTx_Buf)->TX_Tail;
if ((&USARTx_Buf)->TX_Head == tempTX_Tail){
/* Overflow MAX size Situation */
/* Disable the UART Transmit interrupt */
UARTx->CR1 &= ~(USART_CR1_TXEIE);
}else{
/* Start transmitting. */
uint8_t data = (&USARTx_Buf)->TX[(&USARTx_Buf)->TX_Tail];
UARTx->TDR = data;
/* Advance buffer tail. */
(&USARTx_Buf)->TX_Tail = ((&USARTx_Buf)->TX_Tail + 1) & (UART_BUFSIZE-1);
}
}
}
#endifまた、悸狠の奶慨では充り哈みを脱いてノンブロッキング(润票袋)のリングバッファ
菇喇を艰っています。充り哈みル〖チン塑挛はITCMにコ〖ドを芹弥して亩光庐に借妄
できるようにしておきました。
/**************************************************************************/
/*!
@brief Copy Time-Critical codes into ITCM-RAM.
@param None.
@retval None.
*/
/**************************************************************************/
static void datacopy(unsigned int romstart, unsigned int start, unsigned int len)
{
unsigned int *pulDest = (unsigned int*) start;
unsigned int *pulSrc = (unsigned int*) romstart;
unsigned int loop;
for (loop = 0; loop < len; loop = loop + 4)
*pulDest++ = *pulSrc++;
}
/* _stitcm,_sitcm,_eitcm are MUST be decrare in likerscript file */
static void ITCM_Datainit(void)
{
unsigned int *LoadAddr, *ExeAddr, *EndAddr, SectionLen;
/* Copy ITCM Codes into ITCM-RAM */
LoadAddr = &_stitcm;
ExeAddr = &_sitcm;
EndAddr = &_eitcm;
SectionLen = (void*)EndAddr - (void*)ExeAddr;
datacopy((unsigned int)LoadAddr, (unsigned int)ExeAddr, SectionLen);
}碰たり涟の祸ですがITCMで瓢侯させるためにはあらかじめコ〖ドを啪流しておかないと
いけないので弹瓢木稿とかにコ〖ドを流っておきましょう。
その戮嘿かい婶尸はhw_config.cに低まっていますのでそちらをご徊救ねがいます。
というわけでまだほんの警ししか疽拆叫丸ておりませんがひとまずH7を瓢かすための
答塑弄な灌誊の豺棱を乖いました。肌搀からはH7呵络の岂簇であるキャッシュとDMAの
啼玛に磊り哈んでいこうと蛔います—
![]()



倘勒ˇ息晚黎はのリンクを
SNSもやってます

 powered by まめわざ
powered by まめわざ
- ARM/STM32 (119)
- OpenOCD (27)
- ARM/NxP (34)
- ARM/Cypress (5)
- ARM/Others (3)
- ARM/Raspi (1)
- AVR (13)
- FPGA (4)
- GPS/GNSS (20)
- MISC (87)
- SDCard_Rumors (1)
- STM8 (2)
- Wirelessなアレ (16)
- おきぱ (1)
- ぱそこんの络黎栏 (2)
- ブラウザベンチマ〖ク (31)
- 泣塑の极脸殊苹 (28)

- マイコンでSDカ〖ド蝗うときは涩ずプルアップしてね※
⑼ ねむい (11/24) - マイコンでSDカ〖ド蝗うときは涩ずプルアップしてね※
⑼ ひかわ (11/24) - マイコンでSDカ〖ド蝗うときは涩ずプルアップしてね※
⑼ ひかわ (11/24) - マイコンでSDカ〖ド蝗うときは涩ずプルアップしてね※
⑼ ひかわ (11/24) - GNSSモジュ〖ルを活脱する21 -SAM-M10Qが蝉れた∧!?と蛔ったら木せた(おまけあり)-
⑼ Kenji Arai (05/29) - GNSSモジュ〖ルを活脱する21 -SAM-M10Qが蝉れた∧!?と蛔ったら木せた(おまけあり)-
⑼ ねむい (05/26) - GNSSモジュ〖ルを活脱する21 -SAM-M10Qが蝉れた∧!?と蛔ったら木せた(おまけあり)-
⑼ Kenji Arai (05/24) - 面婶颂桅极脸殊苹を饼く -抛侨士填の俯董を额け却ける—-
⑼ ねむい (12/18) - 面婶颂桅极脸殊苹を饼く -抛侨士填の俯董を额け却ける—-
⑼ ひかわ (12/15) - STM32U0はぢめました
⑼ ねむい (08/07)

- January 2026 (1)
- December 2025 (4)
- November 2025 (1)
- October 2025 (1)
- September 2025 (1)
- August 2025 (1)
- July 2025 (1)
- June 2025 (1)
- May 2025 (1)
- April 2025 (1)
- March 2025 (1)
- February 2025 (1)
- January 2025 (1)
- December 2024 (2)
- November 2024 (1)
- October 2024 (1)
- September 2024 (1)
- August 2024 (1)
- July 2024 (1)
- June 2024 (1)
- May 2024 (1)
- April 2024 (1)
- March 2024 (1)
- February 2024 (2)
- January 2024 (1)
- December 2023 (4)
- November 2023 (2)
- October 2023 (2)
- September 2023 (1)
- August 2023 (2)
- July 2023 (1)
- June 2023 (2)
- May 2023 (3)
- April 2023 (1)
- March 2023 (1)
- February 2023 (1)
- January 2023 (1)
- December 2022 (2)
- November 2022 (1)
- October 2022 (1)
- September 2022 (1)
- August 2022 (1)
- July 2022 (1)
- June 2022 (1)
- May 2022 (1)
- April 2022 (1)
- March 2022 (1)
- February 2022 (1)
- January 2022 (1)
- December 2021 (2)
- November 2021 (2)
- October 2021 (1)
- September 2021 (1)
- August 2021 (1)
- July 2021 (1)
- June 2021 (1)
- May 2021 (1)
- April 2021 (1)
- March 2021 (1)
- February 2021 (1)
- January 2021 (1)
- December 2020 (3)
- November 2020 (1)
- October 2020 (1)
- September 2020 (1)
- August 2020 (1)
- July 2020 (1)
- June 2020 (2)
- May 2020 (1)
- April 2020 (1)
- March 2020 (1)
- February 2020 (1)
- January 2020 (1)
- December 2019 (3)
- November 2019 (1)
- October 2019 (1)
- September 2019 (2)
- August 2019 (1)
- July 2019 (1)
- June 2019 (1)
- May 2019 (1)
- April 2019 (1)
- March 2019 (1)
- February 2019 (1)
- January 2019 (1)
- December 2018 (3)
- November 2018 (2)
- October 2018 (1)
- September 2018 (1)
- August 2018 (1)
- July 2018 (1)
- June 2018 (1)
- May 2018 (1)
- April 2018 (2)
- March 2018 (1)
- February 2018 (1)
- January 2018 (1)
- December 2017 (2)
- November 2017 (2)
- October 2017 (1)
- September 2017 (1)
- August 2017 (1)
- July 2017 (1)
- June 2017 (1)
- May 2017 (1)
- April 2017 (1)
- March 2017 (2)
- February 2017 (2)
- January 2017 (2)
- December 2016 (7)
- November 2016 (2)
- October 2016 (2)
- September 2016 (1)
- August 2016 (1)
- July 2016 (1)
- June 2016 (1)
- May 2016 (2)
- April 2016 (1)
- March 2016 (2)
- February 2016 (1)
- January 2016 (1)
- December 2015 (3)
- November 2015 (1)
- October 2015 (3)
- September 2015 (2)
- August 2015 (2)
- July 2015 (3)
- June 2015 (3)
- May 2015 (4)
- April 2015 (2)
- March 2015 (4)
- February 2015 (1)
- January 2015 (3)
- December 2014 (3)
- November 2014 (2)
- October 2014 (1)
- September 2014 (2)
- August 2014 (2)
- July 2014 (3)
- June 2014 (2)
- May 2014 (1)
- April 2014 (1)
- March 2014 (4)
- February 2014 (4)
- January 2014 (3)
- December 2013 (5)
- November 2013 (4)
- October 2013 (3)
- September 2013 (2)
- August 2013 (2)
- July 2013 (2)
- June 2013 (3)
- May 2013 (2)
- April 2013 (2)
- March 2013 (2)
- February 2013 (2)
- January 2013 (3)
- December 2012 (4)
- November 2012 (2)
- October 2012 (2)
- September 2012 (4)
- August 2012 (1)
- July 2012 (3)
- June 2012 (2)
- May 2012 (3)
- April 2012 (3)
- March 2012 (2)
- February 2012 (3)
- January 2012 (3)
- December 2011 (5)
- November 2011 (3)
- October 2011 (2)
- September 2011 (2)
- August 2011 (2)
- July 2011 (2)
- June 2011 (2)
- May 2011 (2)
- April 2011 (2)
- March 2011 (2)
- February 2011 (2)
- January 2011 (3)
- December 2010 (7)
- November 2010 (1)
- October 2010 (1)
- September 2010 (1)
- August 2010 (3)
- July 2010 (4)
- May 2010 (1)
- April 2010 (2)
- March 2010 (2)
- February 2010 (2)
- January 2010 (3)
- December 2009 (3)
- November 2009 (8)
- October 2009 (7)
- September 2009 (5)
- August 2009 (4)
- July 2009 (6)
- June 2009 (6)
- May 2009 (14)
- January 1970 (1)


Copyright(C) B-Blog project All rights reserved.
Comments
Post a Comment